智能PWM控制的机车制动控制单元的设计
然后由此得到各修正参数:
![]()
其中ku为输出量的比例因子:

经过上述过程,可以得到模糊控制器的3个参数:
![]()
5 软件实现
在系统控制电路中,单片机选用ATMEL公司的AT89C55,程序选用C51进行编写。本系统主要模块有主程序、T0中断子程序、模糊PID算法子程序等。主程序流程如图4所示,模糊PID算法的程序流程如图5所示。
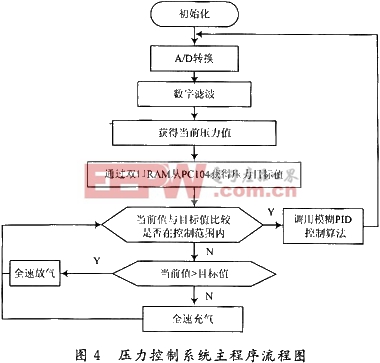

主程序进行一系列的初始化后循环等待中断;T0产生2 ms定时中断,T0中断服务子程序对中断次数计数,每50次中断(100 ms)为一个控制周期,每一个控制周期读入当前气缸压力采样值,调用模糊PID子程序对气缸压力进行精确控制。
6 结 语
(1) 系统充分利用了单片机和PC104的软硬件,系统结构简单、可靠性高、抗干扰能力强。
(2) 系统通过模糊PID算法由单片机产生PWM信号实现对机车制动缸和均衡风缸的压力控制,系统调压范围广,动、静态性能好、控制精度高、自适应能力强。
通过在株洲电力机车厂对制动机的调试表明,基于智能PWM控制的制动控制单元对机车制动机制动缸和均衡风缸的控制精度可达到±0.5 kPa,可以满足电力机车制动控制的需要。

pid控制器相关文章:pid控制器原理
pwm相关文章:pwm原理


评论