基于CPLD的服务机器人视觉系统软硬件设计
2.2 阈值确定和色彩判断
在确定阈值时,首先通过采集样本进行训练,从而得到预定的几种颜色在YUV空间的分量的上下阈值,如图2所示。
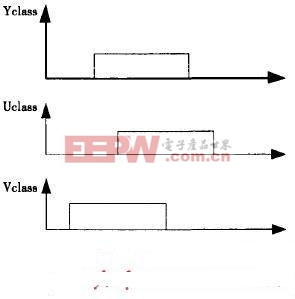
当一个待判定的像素在色彩空间中的位置落在这个长方体中时,就认为该像素属于要找的颜色,从而完成对图像颜色的识别。在Y空间中,Y值表示亮度,因它的变化很大,所以只考虑了U和V的值,在进行颜色判断时,首先分别建立U、V的阈值向量。
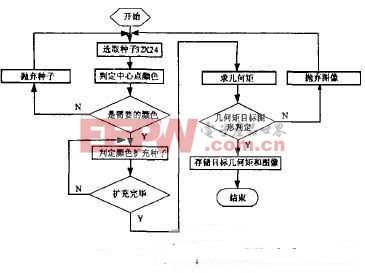
由于在系统中图像传感器的数字信号是8位,即1Byte,共255Byte,系统最多能判定8种颜色。在颜色识别后进行图像分割,在图像分割中采用了种子填充算法,其整个种子的填充是和像素点的颜色同时进行的,一开始不是对所有的像素进行处理,而是分块进行的,本系统采用的块是32×24像素,这样计算量大大减小。当中心点是所要识别的颜色时,就以这个点为种子向四周扩散,并判定周围像素点的颜色,直到填满整个块。在这过程中,同时对目标进行形状识别。本系统采用了基于全局的特征向量的识别算法来进行识别。同时也为构建雅可比矩阵得到需要的矩特征量。图3为图像识别分割流程图。
2.3 视觉跟踪软件原理
当目标物体被识别以后,视觉系统将调整镜头使目标位于视野的中心。一旦物体运动,视觉系统将进行对目标物体的跟踪。
在机器人视觉跟踪系统上,采用无定标的视觉跟踪系统。无定标的视觉跟踪不需要事先对摄像镜头进行定标,而是应用自适应控制方面的原理,在线的实时调整图像雅可比矩阵。通过二维的图像特征信息反馈,这种方式对摄像机模型误差和机器人模型误差、图像误差、图像噪声不敏感。基于图像跟踪的视觉跟踪控制系统,如图4.

控制量c为机器人头部的控制系统。首先把目标放在机器人视野的前方采集到期望的图像,从期望图像中抽取期望的特征集,作为视野跟踪控制系统的期望输入,从而完成任务需要的视野特征集定义。在实时控制系统中,由机器人的图像传感器获取实时采样图像,从中获取实时特征集,这样构成一个视野反馈,引导机器人完成跟踪任务。区别于图像的简单几何特征,本系统选用的视觉特征集为全局的图像描述-图像矩。
根据矩特征变化量与相对位姿变化量之间的关系矩阵,即图像雅可比矩阵,然后利用推导的图像雅可比矩阵,设计了视觉跟踪控制器,完成系统对3D目标物体的平动跟踪。
3 实验结果
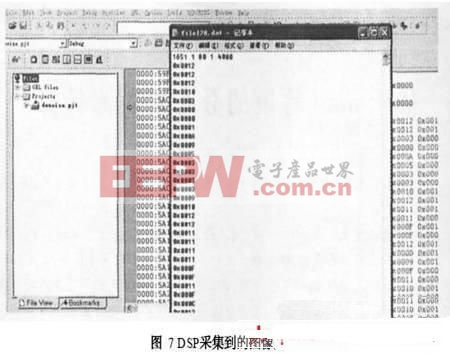
图5为DSP为clkout脚输出波形,表明DSP的内部时钟电路工作正常。图6的图像传感器输出数据波形证明了图像传感器工作正常。图7的DSP采集到的图像数据,可以确定整个图像采集硬件电路工作正常。

4 结 论
针对服务机器人的视觉系统,本文通过构建它的硬件系统和软件系统完成了整个系统的设计。在硬件系统上,采用了CMOS图像传感器,CPLD时序控制,异步动态FIFO的数据缓存,以及高速DSP处理器构成了一个典型的图像采集系统,并调试输出了图像信号。在软件设计上,采用了足球机器人的彩色识别和彩色分割识别技术去完成视觉系统快速准确的识别,采用基于动态的工作方式以及采用基于图像的雅可比矩阵的控制原理,去实现自适应补偿跟踪控制系统。






评论