基于单片机的风洞模型姿态控制系统设计
CJNE A,#0Ah,NOAJI
LJMP ADJI ;攻角方向(α角)
NOAJI: CJNE A,#0BH,ERROR5
LJMP BDJI ;侧滑角方向(β角)
ADJI: MOV A,23H
CJNE A,#0Ah,ADJINOZH
LJMP ADJIZH ;α方向 正转
ADJINOZH :CJNE A,#0BH,ERROR5
LJMP ADJIFU
ADJIZH: SETB AAJFX ;α方向 正转
LJMP AMC_DU
ADJIFU: CLR AAJFX ;α方向 反转
LJMP AMC_DU
AMC_DU: MOV R4,#0AH ;
AMC60: MOV R3,#3CH ;传动比
AMC10: SETB AAJMC
…… …… ; 单个脉冲产生器
RET
(β方向运行程序和α方向相似)
3、 结论
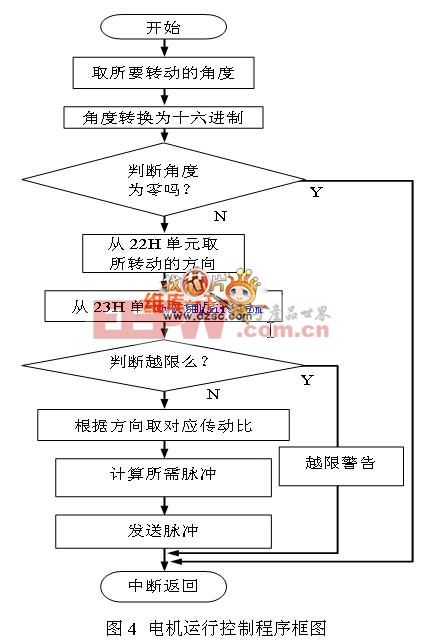
本文作者创新点为:使用自整角机及其变送器代替传统的光电编码器,大大降低了硬件费用。此系统成功应于某大学低速风洞控制系统中,风洞试验中模型的攻角α的变化范围为-10度~+25度;侧滑角β可在-180度~+180度范围内任选角度;控制精度和测量精度均为0.5度。
参考文献:
[1].AT89C52datasheethttp://www.dzsc.com/datasheet/AT89C52_1064535.html.
[2].ASCdatasheethttp://www.dzsc.com/datasheet/ASC_2307774.html.













评论