基于Matlab的小型温度检测系统设计
温度是表征环境的一个重要的参数。在工程领域,尤其像工程热力学等,温度检测非常普遍,对温度精确测量以便实时控制也显得尤为重要。
在控制系统中,上位机与下位机之间实现通信的方法和应用平台很多。目前,以VB和VC开发的通信软件较多,然而,这类软件虽然功能完善,但是数据采集到计算机后要进行各种处理(例如滤波,系统辨识,曲线拟合等)就显得不方便,编程比较复杂。Matlab具有强大的数据处理能力及功能丰富的工具箱,被广泛的应用于信号处理、自动控制等领域[1]。它编程语言简单易学,利用简单的命令就可以代替复杂的代码,极大地提高了开发效率。
本实验基于Matlab环境下设计了一个小型温度检测系统,下位机使用AT89S51单片机和DS18B20完成温度数据采集,上位机在Matlab环境下,调用设备控制箱serial类操作RS-232串口,用串行通信方式交换数据,进而借助Matlab对数据进行分析和处理,得到了温度随时间变化的函数解析式,同时介绍了基于Matlab环境下PC机与单片机串行通信的实时数据处理的实现方法。
2 系统总体设计
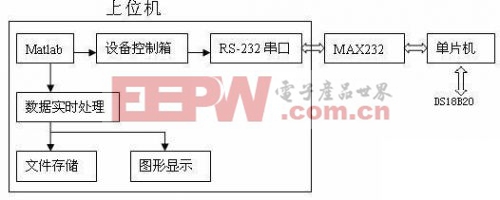
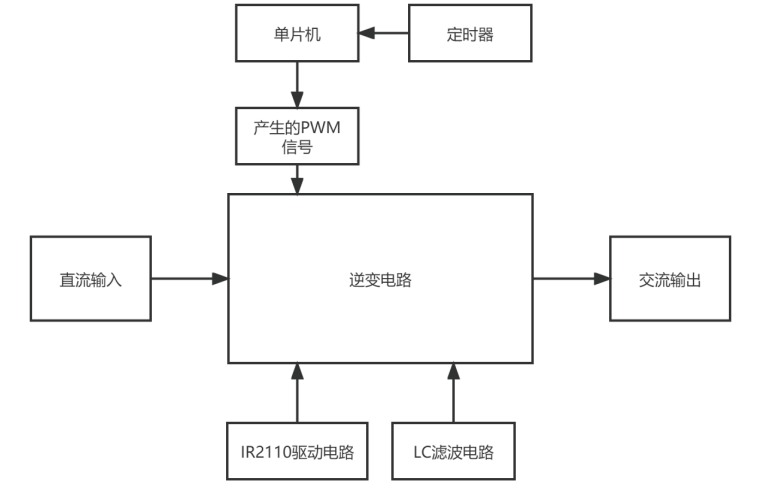
图1 系统结构图
温度检测系统的整体结构如图1所示。PC机串口与单片机USART口通过MAX232电平转换芯片相连,构成一个主从式通信系统。系统工作时,单片机对串口和DS18B20初始化,在读取温度的同时等待中断。PC机通过调用Matlab设备控制工具箱中的serial类及相关函数来创建串口设备对象,并以读写文件的方式实现对PC机串行口的访问,PC机通过Matlab向串行口发送特殊指令从而触发单片机中断系统,单片机调用中断服务例程,读取即使温度并将采集的数据通过串行口回送给PC机。此时,Matlab通过查询的方式,实时接收单片机发送的数据,并完成对数据的分析处理及图形显示。
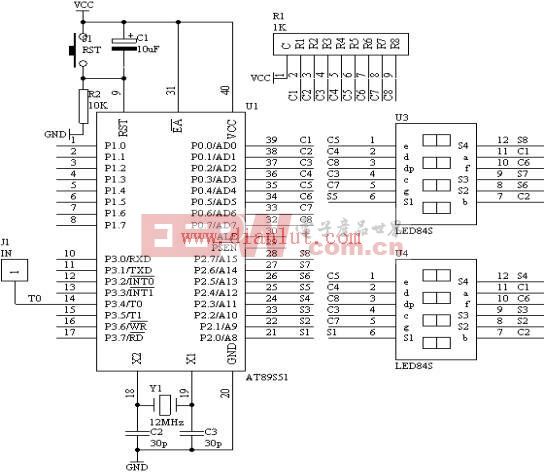
3 下位机部分
下位机部分由AT89S51单片机和DS18B20温度传感器构成,主要负责温度数据的采集工作,并通过串行通信实时地将数据传送到上位机进行处理,PC机与MUC串口通信技术相对而言已经比较成熟。
3.1串行通信协议
串口通信协议SPCP(Serial Port Communication Protocol)设计思想是基于帧传输方式,在本实验中,设定字符格式为1个起始位,8个数据位和一个停止位,无奇偶校验,中间8位即为有效数据,波特率设置为9600,为保证数据可靠传输,在传送数据前通过握手建立连接,软件握手协议规定如下:
上位机发送握手信号0xff给下位机,下位机如果接受到上位机的信号为握手信号,则回送数据包给上位机,其中第一个数据为握手信号,以二个数据为温度传感器采集到的温度数据,此时,上位机如果接受到的第一个数据不是握手信号,则丢弃该数据包,若是,则表示握手成功,直接存储第二个数据。
3.2温度数据采集(DS18B20)
本系统中采用DALLAS生产的“一线总线”可编程数字化温度传感器DS18B20,与微处理器连接时仅需要一条口线即可实现微处理器与DS18B20的双向通讯,在使用中不需要任何外围元件,设计可用数据线供电,简化系统的硬件,同时支持多点组网功能,多个DS18B20可以并联在惟一的三线上,实现多点测温,使用起来非常方便。尽管如此,DS18B20是以牺牲软件资源换取硬件资源的,由于采用单总线数据出数方式,DS18B20的数据I/O均由同一根线完成,因此,对读写的操作时序要求非常严格。
根据DTASHEET,对DS18B20的编程主要注意以下几个方面:
1,精确延时问题[2]:为了保证DS18B20的严格时序,可以将延时分为2种:10us以下的短延时和10us以上的长延时。短延时可以使用C51提供的内部函数_nop_()来实现,一个nop()函数相当于一条DJNZ汇编指令,约2us;长延时主要有15us,90us,270us,540us等,这些延时均为15us的整数倍,一次可以使用nop()函数编写一个延时15us的函数delay15(n)。
2,基本操作:DS18B20的一线工作协议流程是:初始化→ROM操作指令→存储器操作指令→数据传输。对DS18B20 进行所有的读写操作都是从初始化开始的,主要分为初始化操作,读操作和写操作。





评论