μC/OS-II的实时系统加速模块设计
目前,RTOS软件层面的研究已经很成熟,可有效提高RTOS性能的方法有以下几种:
(1)提高处理器的运行频率[2]。这对功耗相当敏感的嵌入式系统并不是好方法。同时高频时钟所引起的电磁干扰对电路板布线的要求也更高;
(2)设计专用于RTOS系统服务的硬件。硬件对相同的操作可并行处理。如果设计一种硬件,在任务数量或TimeTick频率增加的情况下,系统也能在固定的时钟周期内完成所有任务域的更新,从而降低RTOS运行所占的CPU时间。
本文设计了实时系统加速RTA(Real-Time Acceleration)模块,对任务调度和系统时间管理进行硬件化,降低了任务中断时间,并对最终的测量数据进行对比,得出结论。
1 RTA的硬件设计
本文的硬件平台使用OR1200[3] CPU,它是一款由OpenCores网站维护的开放源代码CPU,内部结构可见可修改,且没有版权问题。RTA模块作为从设备连接到Wishbone总线[4]上。在RTA模块中,由硬件实现任务管理和时间管理。RTA中的寄存器全部映射到内存空间上,软件通过对寄存器的访问来控制RTA模块的运行。
该专用硬件可分成如下两部分:
(1)任务管理和时间管理部分。RTA模块支持64个任务,使用基于优先级的调度策略,每个任务有唯一的优先级。RTA只在需要任务切换时才中断CPU。时间延时的最小单位是TimeTick(时钟节拍),最长时间延时可达65 535个TimeTick;
(2)用于产生TimeTick信号的Timer(计时器)。RTA必须有独立的Timer为其产生TimeTick信号。在本文中,利用OR1200自带的Timer完成此工作。
本文使用的系统是在μC/OS-II实时操作系统基础上改进实现的。该RTOS由Micrium网站维护,已经应用于商业产品[5]。整个软硬件的实现在FPGA开发板DE2-70上完成,系统时钟频率为25 MHz。
1.1 任务管理和时间管理
任务管理和时间管理的设计框图如图1所示。
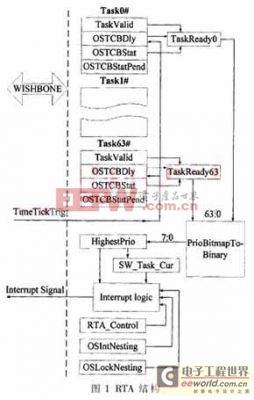
每个任务都有4个域:TaskValid、OSTCBStat、OSTCBDly和OSTCBStatPend。每个任务都有一个任务就绪标志TaskReady,RTA通过PrioBitmapToBinary模块找到最高的优先级并送给HighestPrio。在CPU响应外部中断或者给调度器上锁时,可以通过OSIntNesting和OSLockNesting寄存器关闭RTA的中断。
μC/OS-II实时系统内核中,任务调度基于TimeTick完成,由于程序只能顺序执行,任务的timedly域更新也是顺序执行的,从而使得调度函数的执行时间与运行的任务数量有关。在RTA模块中,基于TimeTick的调度机制并没有改变,只是原型中顺序执行的timedly更新,在硬件中可以同时执行。在使用RTA模块的系统中,移去了软件中的用于任务调度的数据结构,相应地在硬件中予以实现。










评论