基于ATmega8单片机的红外导盲系统设计
盲人在行走引导方面有很大的困难,目前盲人的导盲主要是依靠手杖敲击路面来判断前方是否有可行的路线,这种方法效率不高,且有一定的局限性,无法告知盲人周围障碍物的分布情况和距离。本文对采用光电式的导盲方式进行了探索研究,提出了一种单片机红外避障导盲系统的简便方案,通过单片机采集红外测距传感器的信号,判断出使用者周围障碍物的方位和距离,通过语音芯片发出报警提示信息。该系统具有设计简便小巧,稳定可靠等特点。
1 红外距离传感器的选择
常见的红外距离传感器是运用红外发射管发射出一束红外光,经前方的物体反射后在发射管同一侧用红外接收管检测反射光的强度,从而大致判断出传感器和障碍物的距离。但这种方法对距离的判断误差比较大,因为各种物体表面的反射率因材料的不同而各不相同,对反射接收到的光信号很难同一定标,且该方法容易受到环境光的影响。
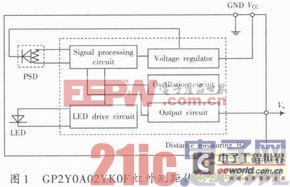
Sharp公司的光电距离传感器GP2Y0A02YK0F可以克服上述缺点。该传感器的内部结构如图1所示。它内部集成了红外调制光发射器、信号处理电路、位置敏感探测元件、输出接口电路等模块。输出与测量距离成比例的模拟电平信号。检测的距离范围为20~150 cm。
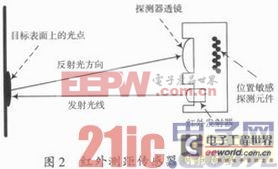
该传感器的距离测量是基于PSD(Position Sensitive Detector)原理,如图2所示。一个红外发射LED先将一束调制光照射到目标物体表面,形成一个光点,从光点反射回来的光经探测器的透镜聚焦后投射到一个特殊的线性位置敏感探测元件上。反射光的入射角随传感器到目标物体表面距离的不同而改变,因而投射到位置敏感探测元件上的位置也不同。在位置探测元件上投射的光点就与目标物体的距离存在一一对应的关系。通过检测位置敏感探测元件上光点的位置,就可以得出传感器与前方物体的距离。由于光在发出时经过调制,该传感器对环境光有一定的抗干扰性,而且这种方法是探测反射光的反射角度而非反射光的强度,因而不会受目标物体表面反射率的影响。



评论