基于CAN总线多轴运动控制器技术的研究
运动控制器通过can总线可以方便向各个伺服单元发送控制指令和位置指令,并实时的获得各个伺服电机的状态信息,按照需要实时地对伺服参数进行修改,各个伺服单元也可以通过can总线及时的进行数据交换。当节点严重错误时,具有自动关闭的功能以切断该节点与总线的联系,使总线上的其他节点及其通信不受影响,具有较强的抗干扰能力。由于运动控制器的位置指令直接输入到各个伺服驱动器,因此每个伺服单元都获得同步控制指令,使得任何一伺服驱动器不受其他伺服驱动器干扰影响。控制器采用arm+dsp可使产品通用性强,可以被广泛的应用于数控产品中,具有较强的硬实时性;快速响应性;由于采用can总线控制,使系统在应用中可根据实际情况扩展多个伺服驱动控制器,具有灵活性;体积小;造价低等优点。
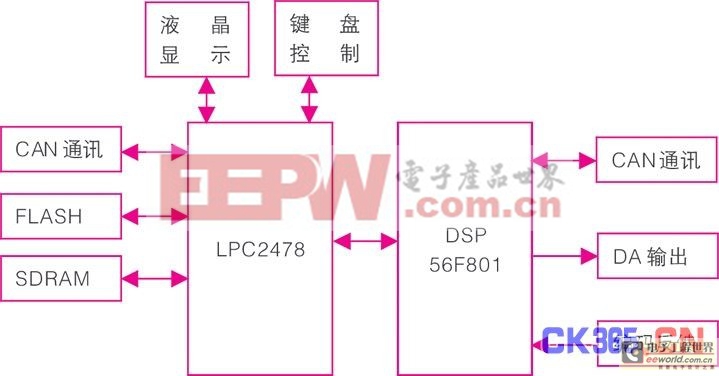
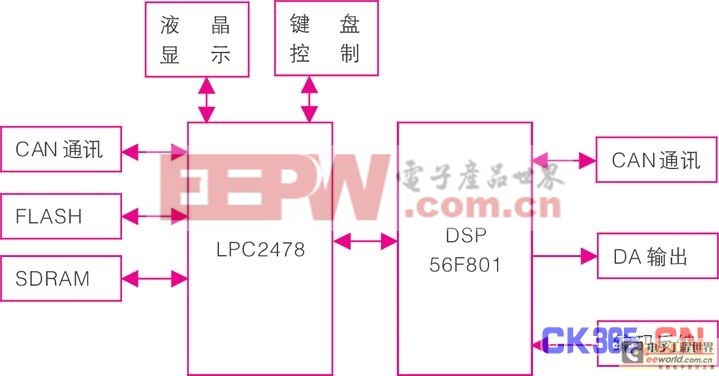
图1 系统结构框图
4 结束语
本文提出的基于can总线多轴运动控制器的设计思路,具有以下优点:
(1)多轴运动控制器采用arm+ dsp,使系统具有稳定性、快速响应性、高精度性、通用性的特点。
(2) 基于arm平台,可以很好的嵌入uc/0sii实时操作系统,增强本系统的硬实时性和灵活性。
(3) 基于can总线控制,控制策略方便灵活,具有很高的可靠性,简化方案节约成本。

伺服电机相关文章:伺服电机工作原理













评论