直流传感器回馈补偿系统的设计
0 引 言
长期以来,由于监视、计量、控制企业生产用电的大电流直流在线测量装置缺乏可靠的计量保证,仪器的指示值仅作为参考数值,这直接影响到这类国营大中型企业的节能降耗、经济效益。要改变这种状况,关键的是要集中现有几种测量原理的优点,克服其缺点,从原理上探索出一种新型强电直流传感理论与方法。
本课题建立了一种磁势自平衡回馈补偿式直流传感机理与方法。磁势自平衡回馈补偿式直流传感机理与方法既具有直流闭环测量原理准确度高、线性度好、抗干扰能力强的优点,也具有开环测量原理电路结构调试简单、消除大功率驱动的困惑、且不存在系统振荡向题的优点。这种测量方法在原理上表现了新颖的特征:由串联型直流电流互感器工作原理可知,同名端对接的两个饱和电抗器在交流电源的正、负半周内,各自维持一次直流被测电流与二次电流之间的磁动势平衡,即在其半个周期内由一个铁心和线圈构成的一个电抗器就可以自动建立此时一、二次之间的直流磁势平衡。但这种磁势平衡没有闭环系统磁势平衡的准确度高,我们就用差值电流补偿的方法实现检测铁心线圈的直流零安匝补偿。此时因一次被测电流磁势绝大部分已被电抗器直接由交流电源提供的电流自动平衡掉,由剩余磁势检测回馈的补偿电流就很小,电子模块的功率小,可靠性高。且该回馈系统的补偿电流具有闭环系统自动跟踪补偿的特性。虽然该直流磁势平衡回路是工作在半个周期的情况下,但经滤波电感滤波后,再加上差值电流回馈补偿系统补偿的电流,即可得到希望的电流。
1 差值电流回馈补偿原理
磁势自平衡回馈补偿式直流传感器原理如图1,图中,D1、D2、D3为二极管;e1、e2为激励电压;L1为滤波电感;Us为检测绕组的输出电压。为提高直流传感器的精度,引入差值电流补偿回路,将磁势自平衡回路输出安匝I2sW2与一次被测直流安匝I1W2之差作为补偿电流回路的输入,对磁势自平衡回路进行自动跟踪补偿,由检测铁心C2和C3、检测绕组WD1和WD2、补偿绕组We、差值电流检测单元以及运算放大及驱动器A构成的补偿回路,是用于对一、二次直流磁势之差的跟踪补偿。
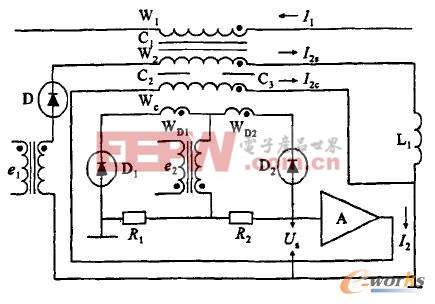
图1 磁势自平衡回馈补偿式直流传感器原理图
为保持相位同步,磁势自平衡回路与差值电流补偿回路的激励电源可采用同一个交流辅助电源。当差值电流所产生的磁动势为0时,两个铁心的激磁状态相同,其内部磁通也相同,因此在一个周期内两检测线圈的平均阻抗也相同,使得差值补偿回路输出电压为0。当差值电流所产生的磁动势(I1W1-I2sW2)>0时,在左边的检测铁心C2中,由差值电流产生的磁动势与激励电流在检测铁心中产生的磁动势iWD1反向叠加,使该铁心中的磁通远离饱和。在右边的检测铁心C3中,差值电流产生的磁势与激励电流在检测铁心中产生的磁动势iWD2同向叠加,使铁心中的磁通趋于饱和。于是在一个周期内,两个检测铁心线圈的平均阻抗不相等,补偿电路输出一个电压,输出的电压经运算放大及驱动环节可得所需的补偿电流磁势I2eWe,实现对一次被测电流和二次平衡电流磁势差(I1W1-I2sW2)的补偿。当(I1W1-I2sW2)<0时,左右铁心的工作状态正好相反,使补偿电路输出一负电压。
2 差值电流回愤补偿系统方块图
为了更清楚地表示一个自动控制系统中各组成环节间的相互影响和信号联系,便于系统的分析研究,用方块图来表示控制系统的组成。差值电流回馈补偿系统的方块图如图2所示。图2中,K2为检测绕组的传递函数;G2为功放增益;G3为补偿绕组传递函数;G4为电导增益;G5为补偿绕组增益。
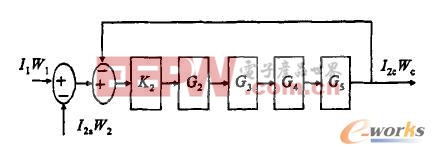
图2 差值电流回馈补偿系统方块图
2.1 差值电流补偿回路的各级传递函数
2.1.1 检测绕组的传递函数
检测回路的输入输出特性见图3。补偿回路开环特性随着直流磁势的增加趋于饱和,由于一次被测直流磁势绝大部分被二次直流磁势自动平衡掉,剩余磁势很小,补偿回路的开环特性可近似看成一条过原点的直线。以(I1W1/W2-I2s)为横坐标x,以U为纵坐标y,可得:y=0.14461x。
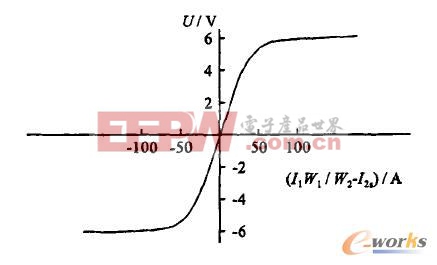
图3 检测回路的输入输出特性
2.1.2 PID控制系统
输出的电流经过运算放大及驱动环节得到所需的补偿电流磁势I2eWe,运算放大环节在自动控制系统中属于比例控制。比例控制的最大缺点是存在余差,当对控制质量有更高要求时,就需要在比例控制基础上,再加上能消除余差的积分控制作用。微分控制系统中即使偏差很小,只要出现变化趋势,就可马上进行控制,有超前控制的特点,因此本文在差值电流补偿回路中采用PID控制器。PID反馈电路如图4所示,它既能快速进行控制,又能消除余差,具有较好的控制性能。比例积分微分控制规律为:![]() 。
。
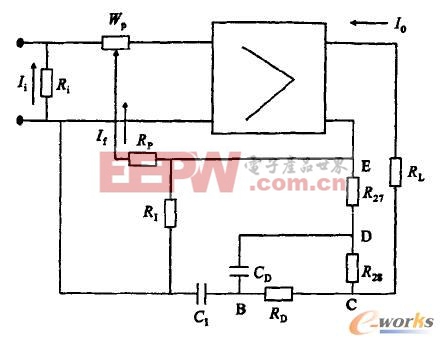
图4 PID反馈电路
PID运算电路的工作过程如下:当输入信号Ii有一阶跃变化时,一开始CD、C1,相当于短路,输入信号突跳至微分作用最大值。继而随着对CD的充电,负反馈电压逐渐升高,输出电流I0逐渐衰减下来。与此同时,CI也被充电,随着CI两端电压逐渐增加,负反馈作用逐渐减小,输出电流I0又慢慢上升。在Ii阶跃作用下,PID输出特性曲线见图5。
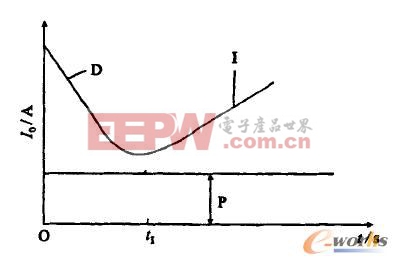
图5 PID调节器输出动态特性
PID控制器的传递函数可表示为:G2(s)=KP(1+1/stI)(1+stD)
式中,比例作用KP=R2/R1=10,积分作用t1=R2C2,微分作用tD=R1C1。
2.1.3 反馈绕组传递函数
反馈绕组的传递函数用G3表示:G3=1/(Ls+R)=L=2.7418H
式中:R=25Ω,为反馈绕组回路总电阻;μ为铁心导磁率,H/m;A为铁心截面积,㎡;l为铁心平均磁路长度,m;L=2.7418H,为反馈绕组的自感;从为反馈绕组匝数。
阻抗增益:G4=1/R=0.06,反馈绕组的比例系数:G5=2000。
3 差值电流回馈补偿系统的德定性分析
差值电流回馈补偿系统的开环传递函数为:

差值补偿电流回馈补偿系统的闭环传递函数为:
![]()
闭环传递函数的特征方程为:
D(s)=sti(s+9.1)+264(1+st1)+(1+stD)
=(264tDt1+t1)s2+(264(tD+t1)+9.1t1)s+264
差值电流回馈补偿系统是一个典型的闭环系统。根据李雅普诺夫稳定性理论,线性系统稳定的充分必要条件是闭环系统特征方程的根都具有负实部,即闭环传递函数的极点均位于坐标平面左半部(不包括虚轴)。但当系统阶次较高时,在一般情况下,求解其特征方程会遇到较大的困难。劳斯及古尔维茨稳定判据,可通过特征方程的根与各项系数的关系来判别系统的特征根是否全部具有负实部,从而分析线性系统的稳定性。
古尔维茨稳定判据求得系统稳定的充要条件:264tDt1+t1>0且264(tD+t1)+9.1t1>0,可见,只要tD>0,t1>0,系统就是稳定的。
4 结 语
磁势自平衡回馈补偿式直流传感器的磁势平衡由铁心的近似矩形磁化曲线决定。其差值电流补偿电路,则是利用双向铁心磁放大器的基本原理,在电抗器铁心的空腔内设置零安匝检测铁心和线圈,用以检测该半周期内直流磁势平衡的安匝差以自动跟踪补偿。根据劳斯阵列的第一列元素符号均为正值可判断差值回馈补偿系统是稳定的。






评论