解决广角镜头梯形失真及桶形失真的技术研究
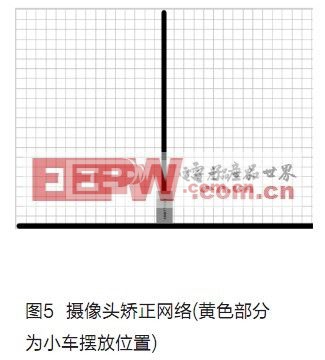
该实验方案很直观,但其操作未必简便。因为摄像头视野较广,所需矫正网络也较大,在其上画方格线很难保证绝对水平或垂直。
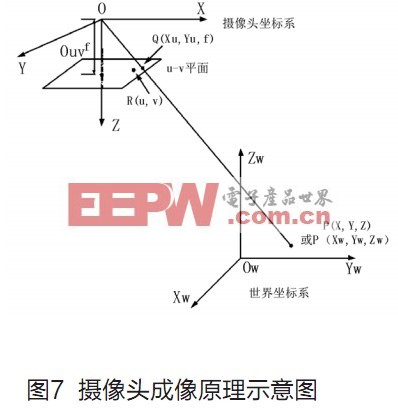
文献[6]根据几何数学建模,得出摄像头获取图像的成像坐标与景物实际的世界坐标的关系。坐标变换关系如下:
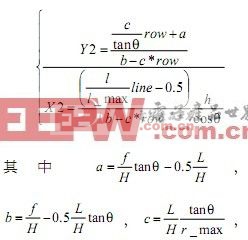
在摄像头安装固定后,c/tanθ、a、b、c、h 和h/cosθ 均为常量。这个方法还是比较好的,但是需要知道f、L、H,这三个参数厂家会提供,但不一定准确,θ也较难准确测量,且不能解决桶形失真的问题
摄像头相关文章:摄像头原理
该实验方案很直观,但其操作未必简便。因为摄像头视野较广,所需矫正网络也较大,在其上画方格线很难保证绝对水平或垂直。
文献[6]根据几何数学建模,得出摄像头获取图像的成像坐标与景物实际的世界坐标的关系。坐标变换关系如下:
在摄像头安装固定后,c/tanθ、a、b、c、h 和h/cosθ 均为常量。这个方法还是比较好的,但是需要知道f、L、H,这三个参数厂家会提供,但不一定准确,θ也较难准确测量,且不能解决桶形失真的问题
摄像头相关文章:摄像头原理



评论