基于伺服电机和运动控制器的目标仿真实时性设计
目标仿真系统研究的是能够实时精确的模拟战场环境中导引头入瞳处接收到的各种目标反射编码激光的光学特性。具体来说就是在计算机和电机控制器的控制下实时控制激光能量和光斑大小的变化,并以此来模拟激光航弹导引头入瞳处的激光目标特性、能量变化特性和光斑大小变化特性。这种精确的模拟要求对目标的位置信息和速度信息等进行实时采集处理。之前基于步进电机伺服驱动系统的程控一体化激光器不能很好的满足系统的实时性要求,因此,笔者设计了基于伺服电机及运动控制卡的运动控制系统。该系统在控制激光光斑大小和能量的实时变化方面较前一系统有了较大改进。
运动控制的实时性设计
对激光光斑的大小和能量的实时性控制,具体体现就是对程控一体化激光器中的可变衰减系统和可控扩束系统进行实时性设计,这是目标仿真系统设计的一个关键。在设计时,我们以某型激光制导武器为背景进行了数字仿真,得到一组典型的数字仿真能量衰减(对应的为电机控制步数数据)曲线如图1~2所示。

由上述数据和图形可见,在初始投弹和飞行的大部分时间里,能量和光斑变化较缓慢,而在接近目标时发生了剧烈的变化。这说明当炸弹接近目标时激光能量和导引头所见光斑大小随时间的变化并不是一个线性关系。鉴于此,本系统在设计时既充分考虑光斑大小和能量的实时跟踪范围,又考虑了工程上实现的可能性,选用了TSA50标准型高速电控平移台。旋转台则选用中空力矩电机带动旋转棱镜来直接实现。特别的,本系统将步进电机驱动的平移台和旋转台均改为由伺服电机进行驱动,主要考虑的是伺服电机启动时间短,速度高,在极短的时间内能够带动激光器内安装的平移棱镜和旋转棱镜做高速运动,来模拟导引头近距离敏感到的光斑的大小和能量,从而能够满足对光斑实时变化的要求。由高速平移台和旋转电机分别驱动扩束系统的目镜和格兰—付克棱镜的检偏镜,使得能量和光斑变化在弹目距离>300m时能完全满足实时性控制要求。而在剩余时间内,由电机做全速运动来近似逼近末段的陡峭变化。
基于以上的目标和对于运动控制功能的设计,采用专用运动控制芯片是一种较好的选择[2]。专用控制芯片通过PCI 总线与PC 机的CPU 通讯,接收PC 机的控制指令,由内部的逻辑电路进行运算和脉冲发送,同时检测一些开关量信号(如限位信号)的状态并向PC 机报告,以实现运动控制的功能。在这种方案中,所有的运动控制细节都由运动控制卡上的专用芯片完成,无需占用PC 机的资源,PC 机可以专注于用户界面的处理和对运动控制卡状态的监控。运动控制专用芯片自身具有强大的运动控制功能,不需要扩展复杂的外围电路。PC 机只需要对运动控制芯片发送命令和参数,控制简单。经过反复的调研和论证,初步确定总体运动控制方案为“PCI 接口芯片+专用运动控制芯片+激光控制模块”。运动控制系统结构
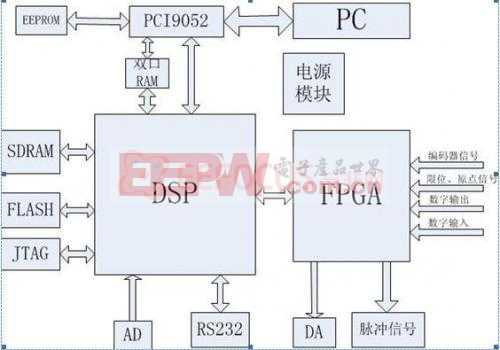
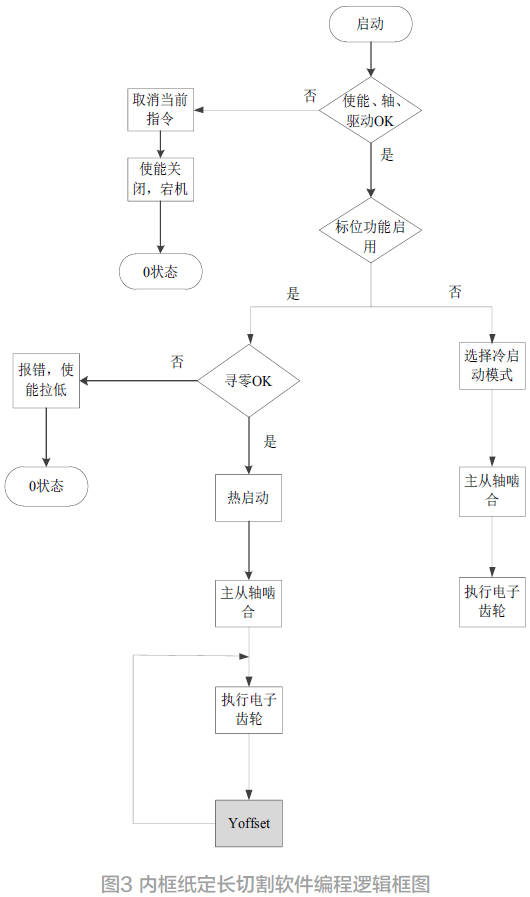
整个控制系统硬件由PC机、DMC5400多轴控制器、增量式编码器以及松下公司的全数字式交流伺服系统(包括电机和驱动器)、中空力矩电机等组成(见图3)。
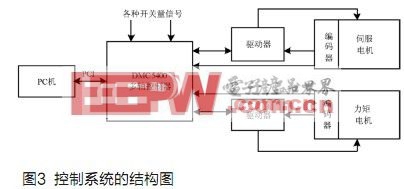
该控制系统以PC机平台为基础,DMC5400多轴运动控制器为运动控制核心。PC机的CPU与DMC5400的CPU构成上下位机的结构,两个CPU各自完成相应的任务。
PC机作为DMC5400的上位机,提供Windows平台及人机操作界面,完成系统初始化、轨迹参数的设定、运动信息的实时显示等,仅需用极少部分时间向控制卡发送运动指令。下位DMC5400多轴运动控制器主要完成平移电机和旋转电机的运动控制,包括伺服驱动、程序解释以及高速数据采集等实时性任务。DMC5400直接插在PC机的PCI插槽中,并由动态链接库驱动。
运动控制系统软件设计
该控制系统实质上是一种以DMC5400为核心组

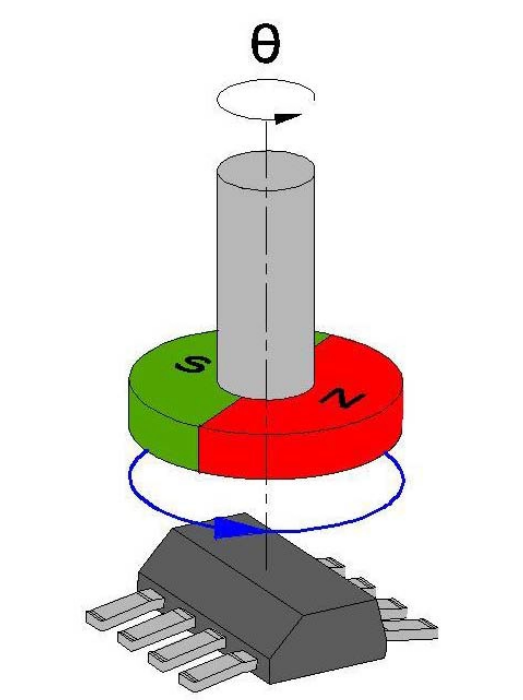
伺服电机相关文章:伺服电机工作原理





评论