基于LabVIEW仿真的全局最短路径的遗传算法设计

判断矩阵A1、3、4、5的行向量线性不相关,秩是列数4,也就是被选中的线段个数即每个个体的基因数。个体{1、2、5、10}因为1、2、5构成了回路,可以得到
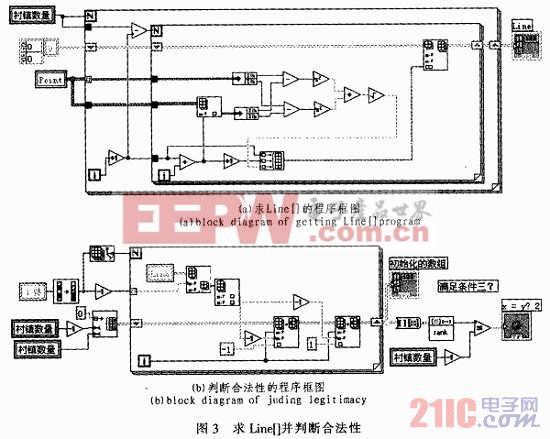
综上,Point[]是已知的。由Point[]可以得到Line[](如图3(a))。任意给定4条线的个体,由Line[]和Point[]得到判断矩阵A,如果rank(A)=M-1,则满足3个条件(如图3(b));否则,该个体非法。本文引用地址:http://www.eepw.com.cn/article/202494.htm
3 初始种群获取
根据上面的说明,本文在获取初始种群时,每一个个体首先是从M(M-1)/2条线段中随机取出M-1条。取得的方法是:
1)建立M(M-1)/2阶布尔数组,数组里每个元素是假常量;
2)产生一个0~1的随机数与M(M-1)/2相乘并向下取整,随机得到一个整数n,则n∈[0,M(M-1)/2-1];
3)将布尔数组中第n个元素替换为真常量;
4)重复2、3步直到布尔数组中有了M-1个真常量;
5)依次提取布尔数组中的每个真常量的索引值并加1。
其取得方法的框图如图4所示。
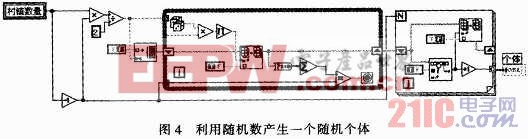
得到的M-1阶常数数组就是一个随机产生的初始个体,而且此个体直接满足条件1和条件2。对这样的个体进行合法性判断,如果不合法舍去重新产生新个体。如果合法保留再生成下一个个体。用for循环来控制种群大小。
4 适应度函数
因为目标函数是求最小值,而且D肯定大于0,所以不妨直接以目标函数的倒数作为适应度函数。
5 遗传策略
本文基于Srinivas提出的自适应遗传算法(Adaptive GA,简称AGA)提出新的编码方式下的遗传策略。
![]()
![]()
式中,pc表示交叉率,Pm表示变异率,fmax表示种群最大适应度值favg表示种群平均适应度值,f表示在要交叉的两个个体中较大的适应度值,f表示要变异的个体适应度值。k1,k2,k3,k4是在0和1之间取值的常数,其中,k3和k4较大。
式(3)和式(4)是AGA根据适应度值调节后的交叉率和变异率,它较好地解决遗传算法中全局搜索和局部搜索的平衡问题,提高了收敛速度。
5.1 杂交
杂交运算是遗传算法扩大优秀基因影响的重要方法。但本文使用的编码方法中,如果使用简单的单点交叉方法,无疑很大概率上将产生不合法的无效子代。如图1中的5个点,两个父代{1、2、3、4}和{4、5、8、10}做交叉运算,无论交叉点在哪都会产生含有2个4号线段的非法子代。不满足条件1。















评论