通信系统的异步传输
0 引言
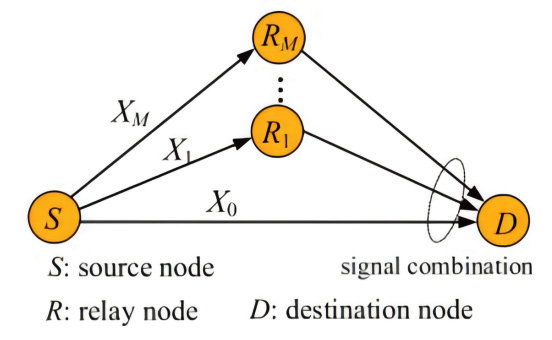
自由空间光学通信(FSO)通信是一种以激光为载体[1],通过大气信道传输数据的无线通信技术。与射频(RF) 和光纤通信技术相比,FSO 通信以其宽频谱、易于部署和高安全性等优点而脱颖而出[2]。因此,FSO 通信对于光纤无法接入的高速和电磁敏感场景具有巨大的研究意义。然而,在空间中传播的光信号很容易受到大气衰减和湍流效应的影响。多输入多输出(MIMO)是一种利用空间分集来减轻大气条件对光传输影响的有效技术。然而FSO、MIMO 通常需要复杂的系统结构,而由于大气条件相似,不同的光链路之间存在信道相关性。作为多节点场景下MIMO 的一种特殊范式,协作通信使用中继节点来补偿源节点和目的节点之间的链路传输质量[3]。基于此,为了减少协同系统中大量链路冗余,提出了一种协同系统的异步传输方案。与以往工作中的同步传输不同,该方案使源节点能够在直接链路和中继链路上传输不同的数据。为了从携带不同数据的链路中获得分集增益,提出了一种平方信号组合方法,对从不同链路接收到的信号进行组合。通过联合决定平方操作前后的信号,来恢复每个链路上的数据。
1 系统模型
1.1 协同FSO系统的同步传输

在传统的系统模型中,在每个链路上传输的光信号保持不变。因此将这种传统的系统模型作为同步传输。图1 将同步传输系统中电组合后的接收信号表示为,




1.3 异步传输系统的实现


图2 异步传输系统结构

注:APD 为二极管;LPF 为低通滤波器;DR 为日期恢复;PG 为脉冲发生器;MZM为马赫- 曾德调制器,Laster为重复上述步骤。
3)接收结构


图4 接收机结构
注:BerAI为比特误码率;DR为日期恢复;Decision为决策;LMSF为滤波器;Squarer为平方器;LPF为低通滤波器;Bias 为偏置电流;APD 为二极管。
结合从L0和L1通过Adder 的信号,还可以得到信号Yac2为:
![]()
式中Y0、Y1为双极结构,N0与N1表示不同频率的高斯白噪声。
Yac2的一个副本被直接发送到决策中进行接下来的位恢复,而另一个副本通过Squarer 生成如下信号Z。
![]()
经过LMS 滤波器(LMSF) 后, 可以得到信号Yac1为
![]()
当考虑均值为零时,AWGN 方差为零,从L0和L1接收到的信号遵循高斯分布,其中i=0,1。
4)系统复杂性分析
可以分别从硬件和算法两方面对异步传输系统进行复杂度分析。
硬件复杂性:必须为发射机上的每个光链路配备1个单独的MZM,以实现在这些链路上的不同数据的并发传输。在实际应用中,对于传输不同数据的光链路,需要要求额外的MZM,这是不可避免的成本。此外,还需要一些基带电气设备来实现接收机上的偏置、平方操作器和LMS 滤波器。
算法复杂度:符号决策仍然在两个振幅之间进行,决策过程不需要任何额外的步骤。因此,符号决策的算法复杂度并没有增加。
2 参数设置
对异步协同传输(ACT)系统与直接传输(DT)系统以及同步协同传输(SCT)的不同解决方案进行了全面的误码率分析。本文设置了两个不同距离和衰减的链路,直接链路L0(2 km,5 dB/km)和继电器链路L1(4 km,5 dB/km),包括继电器前后2 km 的两个子链路。每个链路以10 Gbit/s 的速率传输数据。大气衰减范围为(1 ~ 9.5)dB/km,对应的能见度为6 km(轻雾/ 小雨)至1 km(轻雾/ 大雨)。将整个系统的附加噪声设置为每个APD 的热噪声和背景光噪声。主要参数的设置见表1。
表1 主要参数设置

3 结果分析
图5 显示了随着传输功率Pt和![]() =0.5×10-15m-2/3增加而增加的误码率性能。当采用DT时,L1的误码率优于L0。通过使用ACT,L0的误码率降低,而L1的误码率增加。当DT和ACT中两个链路的BERs平均时,可以发现平均(ACT)的误码率低于平均(DT),这是由于信号组合后信噪比的增加所致。
=0.5×10-15m-2/3增加而增加的误码率性能。当采用DT时,L1的误码率优于L0。通过使用ACT,L0的误码率降低,而L1的误码率增加。当DT和ACT中两个链路的BERs平均时,可以发现平均(ACT)的误码率低于平均(DT),这是由于信号组合后信噪比的增加所致。

图5 ACT与DT对比
本文将低速率同步协同传输(LRSCT)、高速率同步协同传输(HRSCT)和高阶同步协同传输(HOSCT)作为不同的SCT 解决方案,并在图6 中进行比较。在数据速率方面,LRSCT 为10 Gbit/s,ACT、DT、HRSCT和HOSCT 为20 Gbit/s。虽然HRSCT 和HOSCT 具有相同的数据速率,但前者具有较高的符号速率,后者具有较高的调制水平。对于![]() =0.5×10-15m-2/3,随着传输功率的增加,LRSCT 的误码率最低,HOSCT 的误码率最高。ACT 的误码率性能优于DT 和HOSCT。虽然LRSCT 和HRSCT 的误码率都低于ACT,但LRSCT 的比特率更低,而HRSCT 需要更大的频谱带宽。在图7 中,当传输功率固定在20dBm 时,可以通过设置不同的
=0.5×10-15m-2/3,随着传输功率的增加,LRSCT 的误码率最低,HOSCT 的误码率最高。ACT 的误码率性能优于DT 和HOSCT。虽然LRSCT 和HRSCT 的误码率都低于ACT,但LRSCT 的比特率更低,而HRSCT 需要更大的频谱带宽。在图7 中,当传输功率固定在20dBm 时,可以通过设置不同的![]() ,进一步给出随湍流强度变化的误码率结果。结果表明,所提出的ACT 方案在对抗介质到强涡轮机方面优于DT和HOSCT。由于较低的数据速率和较大的频谱带宽,LRSCT 和HRSCT 在不同的湍流强度下具有较低的误码率。还可以发现,降低数据率可以更有效地对抗大气湍流。总之,ACT 为本文提供了数据率和误码率之间理想的权衡解决方案。
,进一步给出随湍流强度变化的误码率结果。结果表明,所提出的ACT 方案在对抗介质到强涡轮机方面优于DT和HOSCT。由于较低的数据速率和较大的频谱带宽,LRSCT 和HRSCT 在不同的湍流强度下具有较低的误码率。还可以发现,降低数据率可以更有效地对抗大气湍流。总之,ACT 为本文提供了数据率和误码率之间理想的权衡解决方案。

图6 ACT与SCT对比

图7 湍流的误码率
为了分析衰减和湍流对ACT 系统的联合影响,图8显示了链路L1在不同衰减和湍流时的误码率结果,传输功率为20dBm,L0的![]() 为0.5×10-15m-2/3。从结果中观察到,当衰减在较低范围时,由于湍流强度的增加,误码率性能发生较大的变化。在较高的衰减范围内,接收到的光信号太弱,即使在弱湍流中也无法从噪声中识别出来,但湍流对误码率的影响较小。
为0.5×10-15m-2/3。从结果中观察到,当衰减在较低范围时,由于湍流强度的增加,误码率性能发生较大的变化。在较高的衰减范围内,接收到的光信号太弱,即使在弱湍流中也无法从噪声中识别出来,但湍流对误码率的影响较小。

图8 联合大气效应
4 结束语
本文提出了一种协同单群通信的异步传输方案,使链路协同传输不同的数据。对系统结构进行了数学分析。结果表明,该系统通过产生更高的信噪比,优于直接传输。作为LRSCT 和HOSCT 系统之间的一种权衡,ACT可以实现比LRSCT 更高的数据速率和比HOSCT更低的BER,而额外的系统复杂性是可以接受的。在今后的工作中,将为ACT 系统提供一种合理的中继选择算法,以进一步扩展其优势。
参考文献:
[1] 国仲凯,姚姝娟,张桂莲.基于改进SIFT算法的无人机航空应急测绘系统设计[J].计算机测量与控制,2022,30(2):215-221.
[2] 李家宁,田永鸿.神经形态视觉传感器的研究进展及应用综述[J].计算机学报,2021,44(6):1258-1286.
[3] 秦勇,惠蕾放,刘晓旭,等.分布式空间系统星间通信组网技术研究综述[J].空间电子技术,2015,12(4):1-10.
[4] 王勇献,张理论,车永刚,等.高阶精度CFD应用在天河2系统上的异构并行模拟与性能优化[J].计算机研究与发展,2015,52(4):833-842.
[5] 李宣华.通信传输系统在轨道交通中的应用[J].中国新技术新产品,2012(19):42.
(本文来源于《电子产品世界》杂志2023年1月期)





评论