RISC-V单片机快速入门02-移植RT_Thread Nano
前言:
本文引用地址:http://www.eepw.com.cn/article/202006/414404.htm上一节,我们使用芯来科技Nuclei Studio IDE搭建了裸机开发环境,本节我们开始正式移植RT_Thread系统。
一、基础知识
1.RT_Thread简介
RT-Thread是一个集实时操作系统(RTOS)内核、中间件组件和开发者社区于一体的技术平台,由熊谱翔先生带领并集合开源社区力量开发而成,RT-Thread也是一个组件完整丰富、高度可伸缩、简易开发、超低功耗、高安全性的物联网操作系统。RT-Thread具备一个IoT OS平台所需的所有关键组件,例如GUI、网络协议栈、安全传输、低功耗组件等等。经过11年的累积发展,RT-Thread已经拥有一个国内最大的嵌入式开源社区,同时被广泛应用于能源、车载、医疗、消费电子等多个行业,累积装机量超过2亿台,成为国人自主开发、国内最成熟稳定和装机量最大的开源RTOS。
2.RT_Thread和RT_Thread Nano区别
RT_Thread有两个版本,一个是RT_Thread Nano,这是一个纯粹的RTOS内核,基本原理和Free RTOS、UCOSIII/UCOSII比较相似,另一个是RT_Thread完整版,完整版是在RT_Thread Nano的基础上,增加了众多的软件包构成,同时支持众多物联网组件,是物联网开发的利器。

3.准备工作
(1)裸机源码:上一节环境搭建篇工程即可
(2)RT_Thread Nano 3.1.3源码: 我已经放到网盘上,也可以从官方下载
(4)硬件:Sipeed Longan开发板
二、移植步骤
1.移植步骤概述
(1)准备一个基础的 NucleiStudio 工程,并获取 RT-Thread Nano 源码压缩包。
(2)在基础工程中添加 RT-Thread Nano 源码,添加相应头文件路径。
(3)适配 Nano,主要从 中断、时钟、内存、应用 这几个方面进行适配,实现移植。
(4)最后可对 Nano 进行配置:Nano 是可裁剪的,通过配置文件 rtconfig.h 实现对系统的裁剪。
2.获取源码
下载上文准备工作中网盘资料,解压后如下:
3.添加Nano源码
在裸机代码根目录创建RT_Thread文件夹,将OS源码中include、libcpu、src文件复制到其中,然后将bsp下的board.c以及rtconfig.h也放进去:
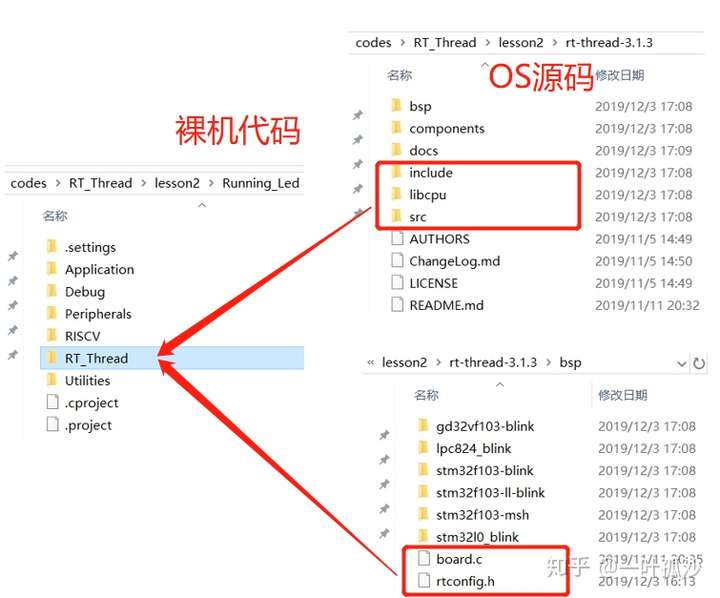
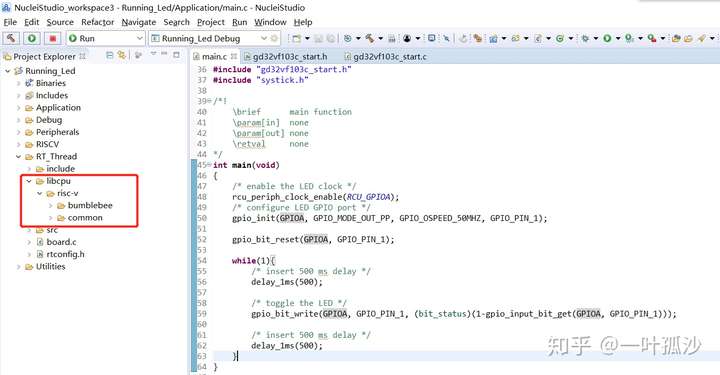
然后删除libcpu下面用不到的代码,仅留risc-v/common、risc-v/bumblebee
4.添加头文件路径
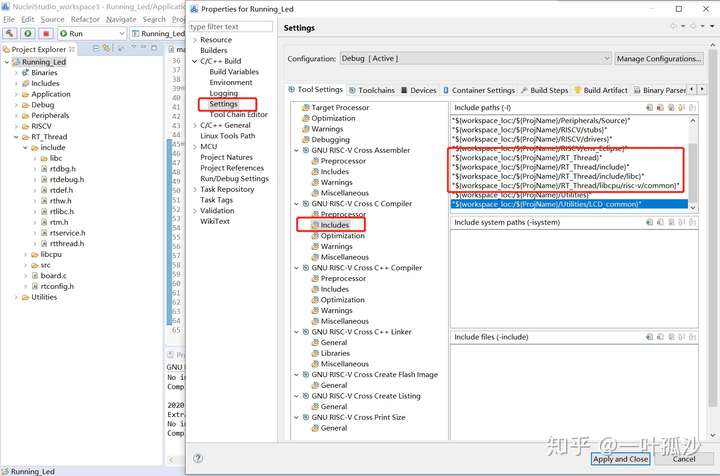
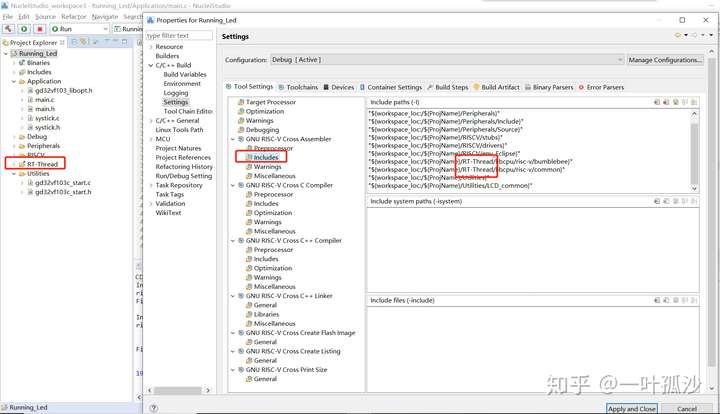
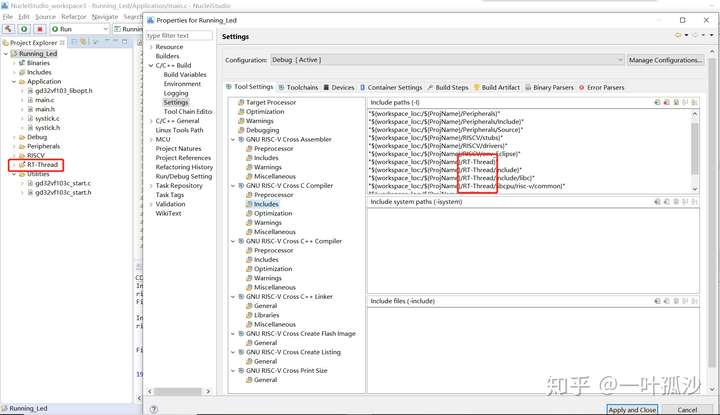
右击工程,点击 properties 进入下图所示界面,点击 C/C++ Build -> settings ,分别添加汇编与 C 的头文件路径
添加汇编路径
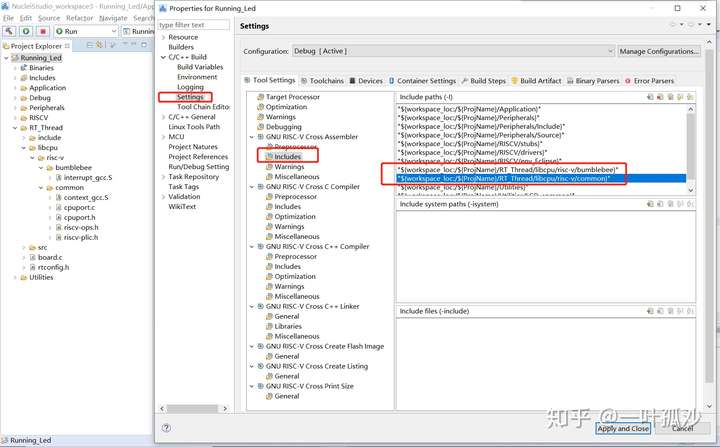
增加.h路径
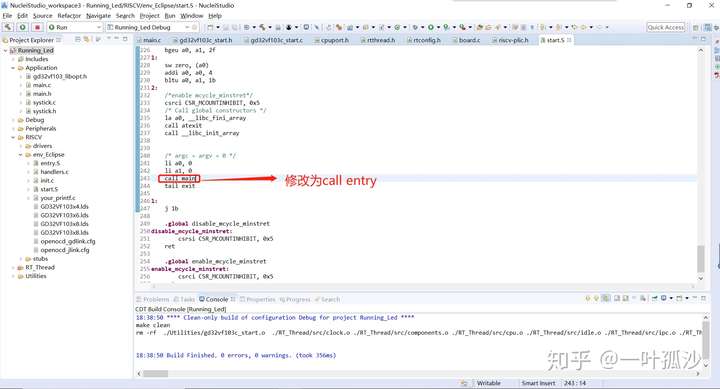
5.适配 RT-Thread Nano
RT_Thread Nano是从entry函数开始启动,因此需要修改Start.s文件中C代码入口函数call main为call entry。
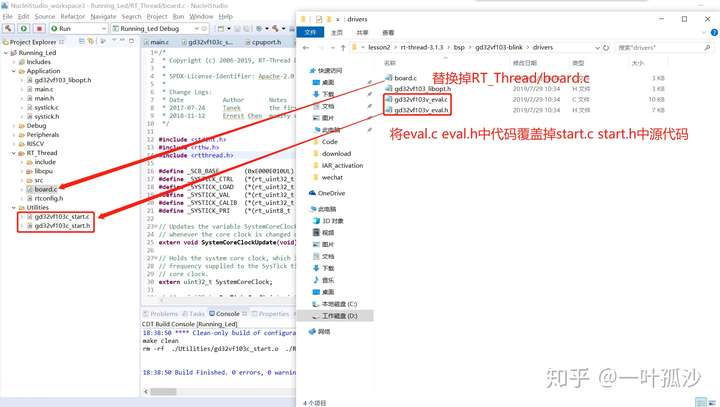
修改时钟和中断,直接将rt-thread-3.1.3/bsp/gd32vf103-blink/drivers下board.c覆盖掉board.c即可,同时将gd32vf103v_eval.c和gd32vf103v_eval.h覆盖掉utilites下文件中内容,主要目的是增加按键和串口相关函数。
三、编译运行
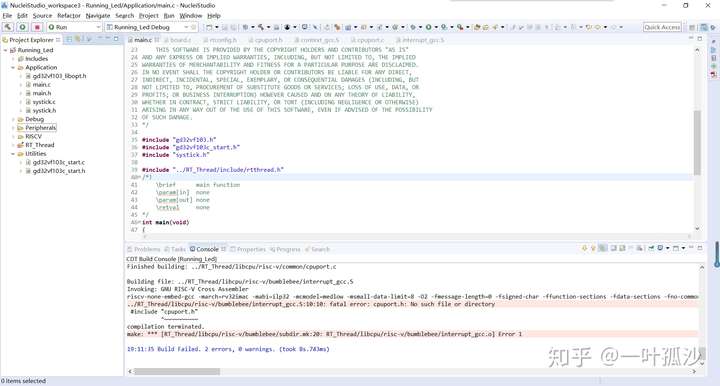
1.编译
点击左上方锤子图标编译,发现编译失败
此时需要修改下根目录RT_Thread为RT-Thread,然后修改配置路径中所有RT_Thread为RT-Thread,注意汇编路径和C路径都需要修改。
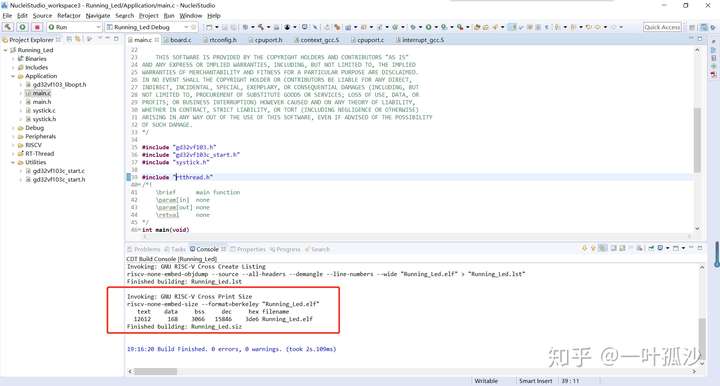
重新编译
2.修改代码
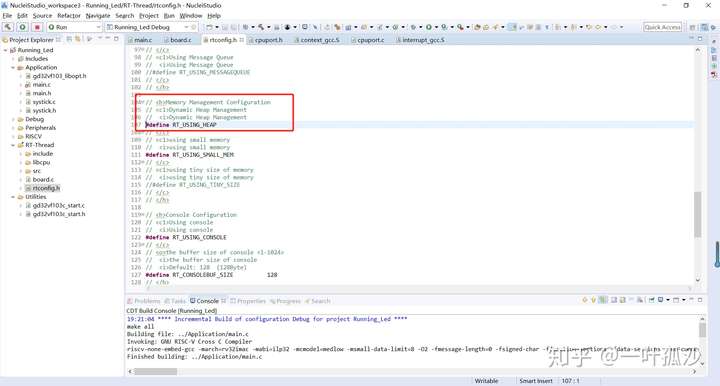
打开堆功能
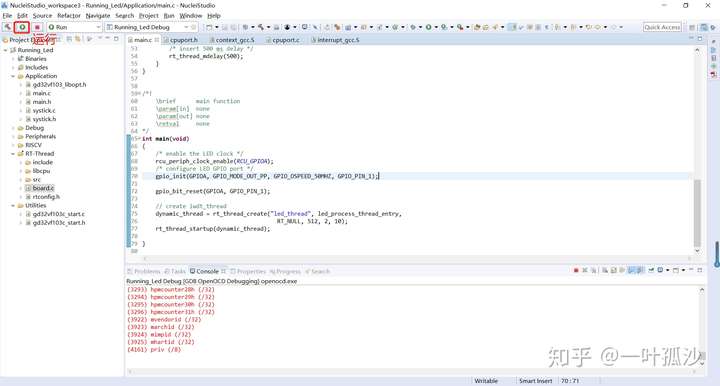
修改main.c内容,创建一个线程,线程中每隔500毫秒开关一次灯
#include "gd32vf103.h"
#include "gd32vf103c_start.h"
#include "rtthread.h"
static rt_thread_t dynamic_thread = RT_NULL;
void led_process_thread_entry(void parameter)
{
rt_err_t ret = RT_EOK;
while(1)
{
/ insert 500 ms delay /
rt_thread_mdelay(500);
/ toggle the LED /
gpio_bit_write(GPIOA, GPIO_PIN_1, (bit_status)(1-gpio_input_bit_get(GPIOA, GPIO_PIN_1)));
/ insert 500 ms delay /
rt_thread_mdelay(500);
}
}
/!
brief main function
param[in] none
param[out] none
retval none
/
int main(void)
{
/ enable the LED clock /
rcu_periph_clock_enable(RCU_GPIOA);
/ configure LED GPIO port */
gpio_init(GPIOA, GPIO_MODE_OUT_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_1);
gpio_bit_reset(GPIOA, GPIO_PIN_1);
// create iwdt_thread
dynamic_thread = rt_thread_create("led_thread", led_process_thread_entry,
RT_NULL, 512, 2, 10);
rt_thread_startup(dynamic_thread);
}3.运行
点击运行按钮
运行现象如下:
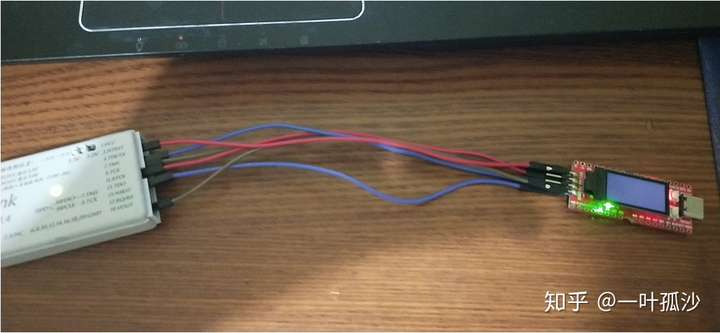
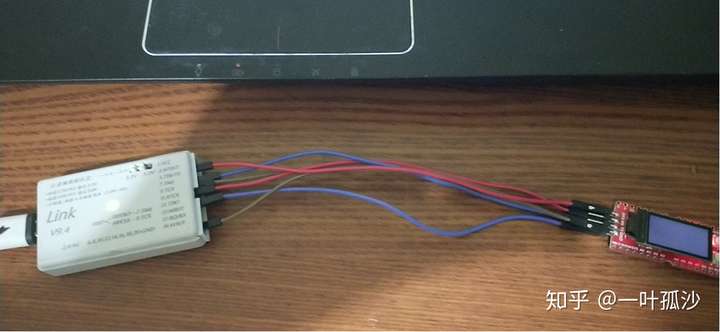
可以看到指示灯循环闪烁,说明我们移植RT_Thread操作系统成功。
寄语:自我突破第一步:从价值表达转变为价值提供





评论