特斯拉和Waymo,做自动驾驶有什么不同?
不过按照个人的理解,特斯拉软件工程师提到的“行为克隆”和Waymo的“模仿学习”是一个意思,等同于大家都在讲的“端到端学习”的方案,即使用一个巨大的神经网络,输入传感器数据后得到关于转向、加速和刹车的整体执行策略。
本文引用地址:http://www.eepw.com.cn/article/201903/398892.htm假设特斯拉采用的是端到端学习方案,那它肯定是不需要对图像进行标记的。唯一需要“标记”的是人类驾驶员的行为,比如转向角是多少、加减速的力度等。将整个传感器数据输入到一个巨大的神经网络后,系统会学习如何将传感器数据与人类驾驶员的行为进行匹配。但我们知道特斯拉是在做图片标记的,所以从这一点出发考虑,它采用的就不大可能是和Waymo一样的“端到端学习”的策略。

(“端到端”与“语义抽象”的差异)
针对自动驾驶感知的算法差异,Mobileye创始人Amnon Shashua曾经对“端到端学习(End-to-End Learning)”和“语义抽象(Semantic Abstraction)”这两个概念做过详细的讲解。
而根据外媒 The Information 报道的内容来推断,特斯拉可能是在开发一套用于路径规划或执行控制的神经网络。而用来训练这套神经网络的数据并非来自传感器,而是由感知神经网络输出的元数据。这样人类驾驶员的直接行为—转向、加速和刹车可以对元数据进行“标记”,类似端到端学习中,驾驶行为与传感器数据的匹配。
这种将感知层和执行层神经网络分开的做法能够规避Shashua教授上面提到的端到端学习可能产生的一系列问题:如“不常见场景”出现的几率会大幅下降;对先备知识(Prior Knowledge)的要求提高,深度神经网络在解决一些简单问题上可能会“惨败”。
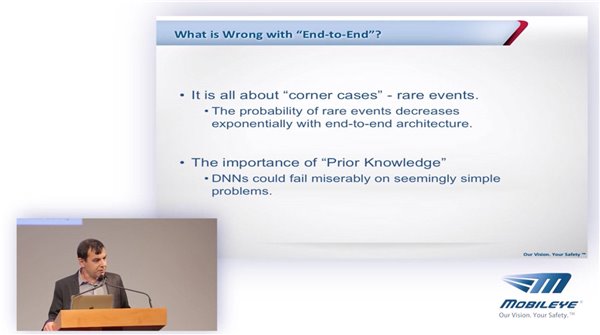
(“端到端”机器学习的局限性)
假设特斯拉用于训练的数据来自特斯拉车主,通过人工的方式将一些“坏的”行为去掉,这样可以避开人工编码算法的局限和模拟测试的不真实。当然特斯拉还可以使用强化学习或监督学习来进一步优化。可以把路径规划或执行控制的神经网络放在运行Autopilot或其他驾驶辅助功能的车子上,一旦出现系统脱离、失效、碰撞等情况,工程师就可以通过bug报告来定位原因。这些“错误”之后还可以用来训练新的神经网络。
如果上面猜测正确的话,这种方法可以用相当快的速度来解决路径规划和执行控制方面的问题。考虑到目前搭载硬件2.0版本的特斯拉车型每个月可以获得近10亿英里的行驶里程,获得的数据量之大是Waymo无法企及的。之后硬件3.0版本上线后,搭载了AI芯片的这套系统会更有利于特斯拉算法的迭代。
一场马拉松式的长跑
尽管Waymo深受“数据”的困扰,但光凭对这个维度的考量自然是没办法断言什么的。只不过Waymo要解决自动驾驶中的“长尾”问题,自然需要更多的数据支持。Waymo近日宣布将在亚利桑那州的梅萨市开设新的技术服务中心,进一步扩大无人车出行服务的规模。显然Waymo是奔着搜集更多“数据”的目的来的。

(基于克莱斯勒Pacifica车型打造的Waymo自动驾驶原型车)
也有人认为,Waymo可以效仿特斯拉开发一套类似Autopilot的驾驶辅助系统,仅使用成本低廉可量产的传感器。一旦在市场铺开后,搜集真实场景的驾驶数据也就不是什么难事了。当然,Waymo自己要完成这件事比较困难,肯定需要来自主机厂领域的合作伙伴。
上周有消息称,“Waymo正在寻求外部投资人”。意料之中的计划。如果有车企成为Waymo的股东,要获得海量的驾驶数据自然容易得多。而且Waymo作为自动驾驶解决方案的供应商,始终只有借助OEM的平台才能最终获得商业化成功。不管是手中的全栈自动驾驶技术亦或是正在进行的移动出行业务,Waymo对很多车企而言,都是有十足吸引力的合作伙伴。Cruise和通用、福特与Argo.AI,这些都是比较成功的先例。
对特斯拉而言,之前因为Model 3陷入“量产地狱”,Autopilot的研发进程似乎出现了停滞,硬件3.0也迟迟没有发布。尽管在“数据”容量上有先天优势,但率先量产以及频发的几次事故使其屡陷舆论风波。所以,特斯拉在自动驾驶上到底能有怎样的成就,还在还很难说。
不过我个人倒是蛮欣赏之前马斯克说过的一段话。
他说,“我不认为哪家企业能在特斯拉之前打造出一套综合性的自动驾驶解决方案。除非它们保密工作做得太好了,到时候要拿出惊人的成果来。我觉得这种可能性不大,对特斯拉而言,任何车企都不是我们的竞争对手”。
希望这种“目中无人”的狂妄自大,可以给特斯拉带来点好运气。







评论