基于DSP的大功率开关电源设计
(5)保护电路
为保证系统中功率转换电路及逆变电路能安全可靠工作,TMs320LF2407A提供了PAPINTA反
输入信号,利用它可以方便的实现逆变系统的各种保护功能,具体实现框图如图6所示:
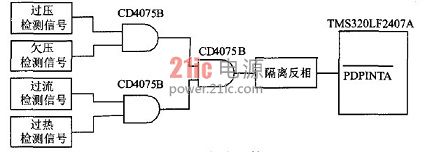
各种故障信号经或门CD4075B综合后,经光电隔离、反相及电平转换后输入到PDPINTA反引脚,有任何故障时,CD4075B输出高电平,PDPINTA反引脚相应被拉为低电平,此时DSP所有PWM输出管脚全部呈现高阻状态,即封锁PWM输出。整个过程不需要程序干预,由硬件实现。这对实现各种故障信号的快速处理非常有用。在故障发生后,只有在人为干预消除故障,重启系统后才能继续工作。
系统的软件实现
为了构建DSP控制器软件框架,使程序易于编写、查错、测试、维护、修改、更新和扩充,在软件设计中采用了模块化设计,将整个软件划分为初始化模块、ADC信号采集模块、PID运算处理模块、PWM波生成模块、液晶显示模块以及按键扫描模块。各模块问的流程如图7所示。

图7 软件模块流程图
1、初始化模块
系统初始化子程序是系统上电后首先执行的一段代码,其功能是保证主程序能够按照预定的方式正确执行。系统的初始化包括所有DSP的基本输入输出单元的初始设置、LCD初始化和外扩单元的检测等。
2、ADC采样模块
TMS320LF2407A芯片内部集成了10位精度的带内置采样/保持的模数转换模块(ADC)。根据系统的技术要求,10位 ADC的精度可以满足电压的分辨率、电流的分辨率的控制要求,因此本设计直接利用DSP芯片内部集成的ADC就可满足控制精度。另外,该10位ADC是高速ADC,最小转换时间可达到500 ns,也满足控制对采样周期要求。
ADC采样模块首先对ADC进行初始化,确定ADC通道的级联方式,采样时间窗口预定标,转换时钟预定标等。然后启动ADC采样,定义三个数组依次存放电压、电流和温度的采样结果,对每一个信号采样8次,经过移位还原后存储到相应的数组中,共得到3组数据。如果预定的ADC中断发生,则转人中断服务程序,对采样的数据进行分析、处理和传输。以电压采样为例,其具体的流程图如图8所示。
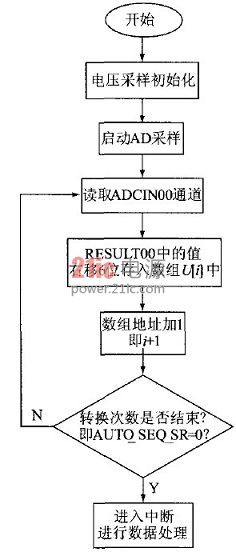
图8 电压采样程序流程图
3、PID运算模块
本系统借助DSP强大的运算功能,通过编程实现了软件PID调节。由于本系统软件中采用的是增量式PID算法,因此需要得到控制量的增量△un ,式(3)为增量式PID算法的离散化形式:
开关电源在进入稳态后,偏差是很小的。如果偏差e在一个很小的范围内波动,控制器对这样微小的偏差计算后,将会输出一个微小的控制量,使输出的控制值在一个很小的范围内,不断改变自己的方向,频繁动作,发生振荡,这既影响输出控制器,也对负载不利。
ADC采样模块首先对ADC进行初始化,确定ADC通道的级联方式,采样时间窗口预定标,转换时钟预定标等。然后启动ADC采样,定义三个数组依次存放电压、电流和温度的采样结果,对每一个信号采样8次,经过移位还原后存储到相应的数组中,共得到3组数据。如果预定的ADC中断发生,则转人中断服务程序,对采样的数据进行分析、处理和传输。以电压采样为例,其具体的流程图如图8所示。
图8 电压采样程序流程图
3、PID运算模块
本系统借助DSP强大的运算功能,通过编程实现了软件PID调节。由于本系统软件中采用的是增量式PID算法,因此需要得到控制量的增量△un ,式(3)为增量式PID算法的离散化形式:
开关电源在进入稳态后,偏差是很小的。如果偏差e在一个很小的范围内波动,控制器对这样微小的偏差计算后,将会输出一个微小的控制量,使输出的控制值在一个很小的范围内,不断改变自己的方向,频繁动作,发生振荡,这既影响输出控制器,也对负载不利。
为了避免控制动作过于频繁,消除由于频繁动作所引起的系统振荡,在PID算法的设计中设定了一个输出允许带eo。当采集到的偏差|en|≤eo时,不改变控制量,使充电过程能够稳定地进行;只有当|en| >eo 时才对输出控制量进行调节。PID控制模块的程序流程如图9所示:







评论