基于新型控制策略的SRD性能优化问题
0 引言
本文引用地址:http://www.eepw.com.cn/article/201808/387692.htm开关磁阻电动机调速系统(Switched ReluctanceDrives,简称SRD)以其结构简单、工作可靠、转矩惯量比大、效率高和成本较低等优点脱颖而出,被认为是未来有很强竞争力的一种变速驱动系统。但是因为电动机采用的是双凸极结构,高度饱和,故开关磁阻电动机调速系统本身是一个时变、非线性系统。磁阻转矩是定子电流和转子位置的非线性函数,传统的线性控制方法难以满足动态较快的开关磁阻电机(SRM)非线性、变参数要求,因此,与一般电机相比,开关磁阻电动机转矩脉动比较明显,由此引起电机噪声及转速波动,这限制了它的应用[1]。近年来,很多专家学者在开关磁阻电机调速系统的性能优化方面下了不少功夫。开关磁阻电机调速系统要做到最优化应该在参数最优化、结构最优化、功能最优化等三方面下功夫。SRD性能的改善不能一味地依靠优化SRM与功率变换器设计,还必须借助先进控制策略的手段。从20世纪80年代SRM 问世至今,在SRM控制方面已涌现出大量先进的控制思想,并取得了有益的成果。本文结合SRM 的控制模式,综述比较SRM的各种新型控制方法,分析和介绍了各控制策略的优缺点,展望了SRM控制策略的发展新趋势,并阐述运用新型控制策略对开关磁阻电机调速系统性能的改善。
1 开关磁阻电机调速系统的组成
开关磁阻电机调速系统主要是由四部分组成:开关磁阻电机、功率变换器、控制系统及检测系统,如图1所示。SRM是实现机电能量转换的部件,也是此系统区别于其他电动机调速系统的主要标志。功率变换器负责提供能量,一般是由交流电经整流后得到的直流供电。控制器是此系统的核心,处理反馈信号,计算转速,转子位置,从而输出相应控制信号来控制电机以实现需要的功能。检测系统一般包括电流检测和位置检测,为控制系统提供必需的信号。
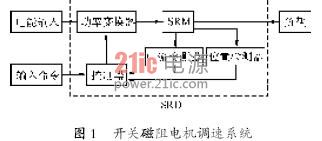
来控制电机以实现需要的功能。检测系统一般包括电流检测和位置检测,为控制系统提供必需的信号。
2 SRM 的控制方法
由SRM的准线性模型分析得到式(1)所示的平均电磁转矩(Tav)的解析。

当给定电动机,电机的结构参数是一定的。若要改变电机转矩大小,只有改变SRM 的控制参数:定子绕组电压Us 、开通角兹on与关断角兹off。SRM 控制参数多,控制系统设计的主要问题是实现参数最优化,结构最优化和功能最优化。根据改变控制参数的不同方式,SRM 有三种控制模式,即电流斩波控制(Current Chopping Control,简称CCC)、角度位置控制(Angular Position Control,简称APC)与电压控制(Voltage Control,简称VC)。其中,CCC一般应用于电机低速区,是为限制电流超过功率开关器件和电机允许的最大电流而采取的方法;APC 是电压保持不变,通过改变开通角和关断角调节电机转矩大小,适于电机较高速区,但是对于每一个由转速与转矩确定的运行点,开通角与关断角有多种组合,每一种组合对应不同的性能,具体操作较复杂,且很难得到满意的性能;VC是在固定的开关角条件下,通过调节绕组电压来控制电机转速,它分直流侧PWM 斩波调压、相开关斩波调压与无斩波调压,而无斩波调压是通过调节整流电压以响应电机转速要求,在整个速度范围内只有一个运行模式,即单脉冲方式。
3 SRM 的几种新型控制策略
早期的控制策略主要以线性模型为基础,结合传统PI 和PID 控制,例如采用前馈转矩和电流控制、反馈转速控制等。但是基于线性假设的SRM 控制系统难以获得理想的输出特性,鲁棒性差,其动静态性能无法与直流传动相媲美,这严重阻碍了SRD的发展。SRM 是高速非线性系统,具有双凸极集中绕组的几何结构,为了输出最大转矩而常运行于饱和状态,磁阻转矩是绕组电流和转子位置的非线性函数。传统的线性控制方法难以满足动态较快的SRM非线性、变参数要求。近几年,为了改善系统的性能,国内外发表了一些基于现代控制理论和智能控制技术建立SRD动态模型和系统设计的文献。
3.1 滑模变结构控制
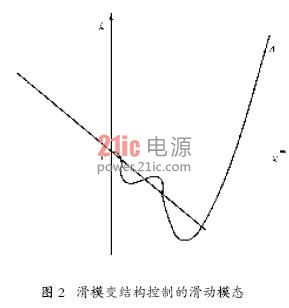
根据变结构控制理论,在滑模变结构控制中,系统的闭环传递函数的特征方程以极高的频率切换,通过对系统实时目标误差及其各阶导数的检测、运算、判断,并以理想开关的方式切换控制量的大小和符号,使系统的结构发生变换,从而使系统的状态在预先设计的一个特殊超平面的领域内向平衡点滑动,达到并稳定在平衡点,如图2所示。
滑模变结构控制是对不定性非线性动力学系统进行控制的一种方法。系统中的控制器是由若干个参数或结构不同的子控制器组成的。该系统在工作过程中,预先为控制系统在状态空间中设计一个特殊的超平面,利用不连续的控制规则,使系统在一定的条件下沿规定的状态轨迹做小幅、高频率的上下运动,迫使系统的状态沿着这个规定的超平面向平衡点滑动,最后渐进稳定于平衡点或平衡点的某个允许的邻域内,即滑动模态运动。滑模变结构控制对系统的参数变化和不确定性扰动有较强的鲁棒性,并具有降阶解耦、响应速度快、动态性能好和易于实现的优点。滑模变结构系统的滑动模态具有完全的自适应性,任一系统都有不确定的参数,要受到外部环境的各种干扰等,但通过构造滑模变结构控制的控制律可使得各种外界扰动对滑动模态不发生影响,实现完全自适应,提高SRD的性能。


















评论