水下机器人嵌入式控制系统设计和运动控制仿真-
ROV在水底的前进和转向运动通过控制两个螺旋桨推进器来实现。给定参数为航速和航向角,输出为两个推进器的推力。这里航向角控制器选择PID调节器。只有两个推进器,推力分配算法简单。
本文引用地址:http://www.eepw.com.cn/article/201808/386781.htm5 仿真研究为了验证水下探测ROV设计的合理性,进行了仿真研究。5.1 水下机器人模型建立水下机器人6自由度运动模型的各个自由度彼此之间存在耦合,由于水下探测ROV常在低速下运动,可以将其运动分解为为水平面运动(包括状态变量
)和垂直面运动(包括状态变量

)两部分,并且认为这两个自由度之间不存在耦合关系。结合本文研究对象的情况,设计方案中ROV的外形为左右、前后对称,且重力、浮力分布可使其保持水平状态,无横倾或纵倾。其在水平面运动过程中,ROV满足条件:

此外,由于其只沿纵向平行安装两个水平推进器,推进器的作用只限于产生水下机器人的进退和转艏运动。当左右推进器产生相同推力矢量时可引起进退运动,而当两者产生大小或方向不同的推力时则可引起转艏运动。根据上述假设和条件可以得到ROV在水平面内的简化模型:
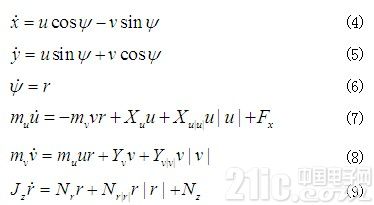
式中:

——包含附加质量的质量和转动惯量;


—沿

方向的流体阻力中线性项和非线性项;
——绕Z轴转动方向的流体阻力的线性项和非线性项;

——为推进器产生的X轴向力和绕Z轴的转艏力矩。ROV采用压载水舱进行垂直面的位置控制,其在垂直面的模型可以简化为:

式中:
——包含附加质量的质量;
——沿Z方向流体阻力的线性项和非线性项;

——压载水舱产生的垂向作用力。5.2 仿真验证
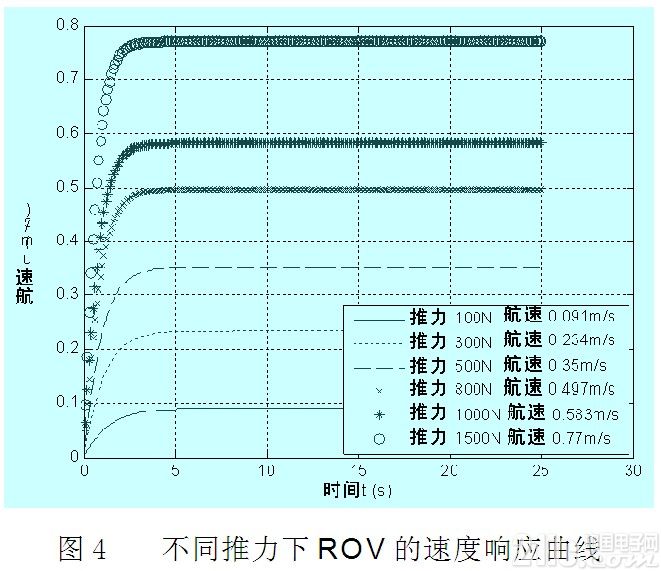
仿真情况设定为:ROV由初始静止状态开始运动。为实现直航,需保持左右推进器输出相同大小和方向的推力。不同推力情况下ROV的速度响应曲线如图4所示。由速度响应曲线可以发现,其速度经过一段时间的增加后最终保持在一定的数值,此时推力与阻力达到动态平衡,ROV作匀速直线航行。令

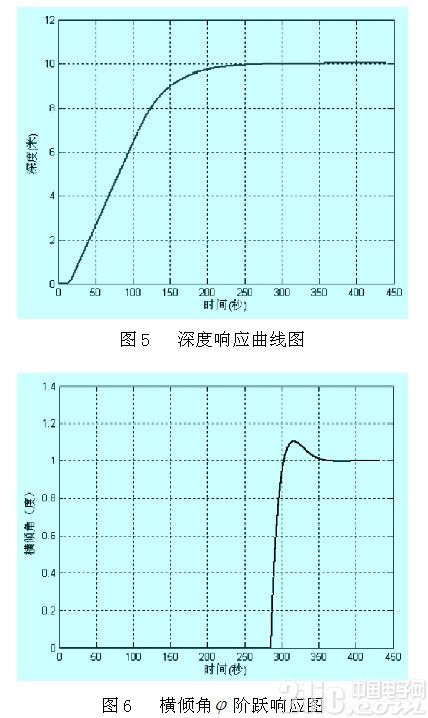
表示ROV在大地坐标系下的位置和姿态。图5为ROV由初态
控制ROV垂直下潜到10米处悬停。ROV横倾角

的控制是通过调节特种ROV左右两个浮力调节舱的不同的注、排水量来产生左右两个浮力调节舱的浮力差,即产生旋转运动的偏倾力矩。其仿真结果如下图6所示。从仿真实验结果看出所设计的ROV深度协调控制器达到了预期的控制效果。
6 结束语本文介绍了开架式水下探测机器人的结构、传感器系统,基于AT91RM9200处理器设计了ROV嵌入式控制器。建立了ROV的数学模型,提出了ROV垂直面协调运动控制的方法,并进行了深度和横倾角协调控制仿真。仿真实验证明控制器设计的有效性。
参考文献:[1] 徐玉如,庞永杰,甘永.智能水下机器人技术展望[J].智能系统学报,2006,1(1):9-16.[2] 封锡盛,刘永宽.自治水下机器人研究开发的现状和趋势[J].高技术通讯,1999,(9):55-59.[3] 甘永,王丽荣,刘建成.水下机器人嵌入式基础运动控制系统[J].机器人,2004,26(3):25-29.[4] MICHAEL J,RUTH A.Robust depth and speed control system for a low-speed undersea vehicle[C].Proceedings of the Symposium on Autonomous Underwater Vehicle Technology.1990:51-58.[5] 戴学丰,边信黔.6自由度水下机器人轨迹控制仿真研究[J].系统仿真学报,2001,13(3):368-369.[6] 翟宇毅,马金明,姚志良。超小型潜水机器人沉浮系统设计[J].光学精密工程,2004,12(3):231-234.[7] 周立功.AMR嵌入式系统基础教程[M].北京:北京航空航天大学,2005.作者简介:周丽丽(1983-),在读博士,助理研究员,研究方向:机器视觉与安全分析。








评论