通俗易懂讲PIC单片机:从一窍不通到入门进步
单片机入门不难------谈PIC系列(转自矿石收音机论坛---崂山)十年前的老帖子,讲得通俗易懂,分享之。
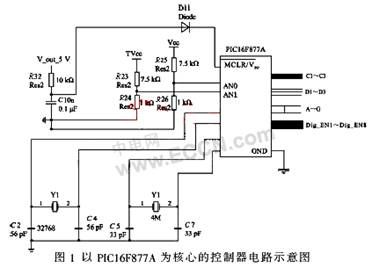
本文引用地址:http://www.eepw.com.cn/article/201803/376687.htm请看图1

这个8条腿的小螃蟹就是我们的第一顿饭,只要把它吃下去,以后的大餐就好办了。
第1、8条腿接电源 +5V 和 地线。头两条腿是螃蟹钳子,好吃的很。 现在剩下了 6 条腿
第2、3条腿 使用时外接一个晶振的东西 我们接一个 4 MHz的。
第4条腿是复位脚,是一个信号输入脚。单片机正常运行时接高电平。当有一个低电平脉冲输入到这个脚时单片机就复位。所谓复位就是单片机内部所有的工作部件统统回到规定的状态,程序也复位到头一句上开始逐条运行。例如,你设计的一个报警锁定的 LED红灯亮后,当需要解除报警时,用一个按钮给这个脚瞬时接地一下,相当于给它一个夫脉冲,系统就复位了,led灯就熄灭了,程序从头开始。
以上5个脚,几乎所有单片机都有,包括世界上最复杂的,和世界比较简单的单片机-----PIC12CE519
轮到底几条腿啦?奥是第5条腿,这条叫单片机的 I/O 脚。就是输入输出脚。你可通过程序动态地控制它作为输入或输出,作为输出时可以程序控制它的输出电平为高1或低0。所以,他的工作状态有四种:输入0,输入1,输出0,输出1
剩下的两条腿和第5脚功能一个样。
上边我们已经把8条腿消化掉了,其实我们要弄明白的也就3只腿,我们再简单一些,先整明白两条腿,即GP0,GP1.这两条腿低级一点的用法,可以控制继电器,LED灯,高级一些的用法可以进行I2C总线,RS232总线的通信,作为扩展输入可以模拟出来A/D转换器(6--7bit),可以测量一个电阻的粗略值。作为输出也可以直接推动扬声器奏出音乐。这是后话暂且不提。
现在要控制使用这两只腿,我这个三脚猫功夫的说书的不得不讲一下软件了,要想讲明白软件又不得不涉及到单片机的内部结构。那位说啦,你可别提这软件和结构了,以前俺就是让它们打败的,现在听到这个心里就打鼓。嘿嘿,不要紧,果真如你所说,那你就不妨跟着我再失败一次, 反正吗多一次失败又不纳税,嘿嘿。不过你也要有思想准备,彻底弄明白是个渐进的过程。
要说这程序和单片机内部结构,还真是老大难,不过蟹黄蟹肉都可都在里面。我现在要是给你说PIC单片机是哈佛结构的,51系列是冯-诺伊曼结构的,恐怕你要立马扎走人了。所以我得用点心思不让你溜号。
好在PIC系列的制造商(microchip 微芯公司 美国)理解我等苦衷,全部只有35条指令,而且有一些指令我们一般很少使用,常用的也就十几句,用的时候查手册,无需记忆。就算我们两天学习一句,也就两三个月时间,总比到老了还怕它们强啊。废话少说先看下面的两个例语:
my_name006: movlw 02h '常数2进入w
movwf GPIO 'W 的数进入 寄存器GPIO
这就是我们编的程序里的两个句子,也叫源程序。有以下特点
每行只能写一句话
每句话由四部分组成:
标号: 操作指令 操作数 '程序注释
下面我结合例子把这四部分解释一下。
第一部分 my_name006: 叫做标号,它是由字母或数字组成,由冒号结束。标号可有可无,比如第二句就没有标号。
第二部分movlw 叫做操作指令。它是必须有的,不能省略。PIC 系列的单片机共有 35 条指令。
第三部分02h 叫做操作数。有的指令没有操作数或者操作数是默认的,也不用写。
第四部分是程序注释,必须以单引号开头,主要作用是提醒和备忘。注释也是可有可无。
第二个例句中,省略了标号,当然注释也可以省略。他的指令是movwf, 操作数是GPIO。操作数不一定是数字,也可能是一个由字母组成的字符串。
知道了语句格式以后,我们下面就学习一些常用语句。我们先把这两个例句弄清楚。
这两句话的作用是把 2 这个常数写入到 GPIO 这个寄存器里。
单片机里有一些部件需要我们使用和操作,都是通过读写寄存器来实现的。每个部件都对应有操控它的寄存器,例如我们要控制使用的管脚GP0,GP1 这两个管脚对应的寄存器就叫做GPIO。对GPIO寄存器读操作,实际等效察看管脚电平的高低;对GPIO寄存器相应的位写1操作,实际等校让管脚输出高电平。写0,输出低电平。
每个寄存器可以储存一个八位的二进制数。这八个位的每个位都有名称,从左向右的名称是:
左端第首位名称叫D7,
左端第二位名称叫D6,
左端第三位名称叫D5,
左端第四位名称叫D4,
左端第五位名称叫D3,
左端第六位名称叫D2,
左端第七位名称叫D1,
最后一位叫D0,
而每一个位对应一个管脚的电平,例如当GPIO寄存器的D0位等于1时表示管脚GP0 的电平是高电平。D0位等于0时表示管脚GP0 的电平是低电平。常数2的八位二进制表示是“00000010” 所以,GPIO寄存器存放的8位2进制数的每个位的值以及管脚电平是:
D7对 应于内部总线管脚的电平 D7=0 内部总线管脚输出低电平
D6对应于内部总线管脚的电平 D6=0 内部总线管脚输出低电平
D5对应于GP5 管脚的电平 D5=0 GP5 管脚输出低电平
D4对应于GP4 管脚的电平 D4=0 GP4 管脚输出低电平
D3对应于GP3 管脚的电平 D3=0 GP3 管脚输出低电平
D2对应于GP2 管脚的电平 D2=0 GP2 管脚输出低电平
D1对应于GP1 管脚的电平 D1=1 GP1 管脚输出低电平
D0对应于GP0 管脚的电平 D0=0 GP0 管脚输出低电平
GP0---GP5管脚我们可以从上一讲的图1硬件中查出所对应的管脚。d7 d6 对应的内部时钟和数据总线我们现在暂且不要管它。以后本事大了在调教它们。在我们的例句中,向GPIO寄存器写入了2,常数2的八位二进制表示是“00000010” 因此如果此时GP0, Gp1等都已经被定义成输出的话,那么GP1输出高电平(接LED灯亮),GP0 输出低电平(所接led灯熄) 。
截止到现在,你已经学会如何控制管脚的电平高低了。尽管还有一些疑问,比如怎样定义管脚为输出脚(以后会说),我得说如果事先gp1,gp0这两个管脚处于输入状态,这两个例句无效,是控制不了电平的。
无论如何,这一会儿,你就学会了两个指令,35条我看也没啥难的。
'------------------------------------------------------------------------------
再加深一下对寄存器的认识:
要把一个常数存储到,或者说写到一个寄存器中,仅用一条指令是办不到的,必须通过一个特殊的寄存器W,把数据倒过去. 这就应该使用到两个语句。
movlw 02H 指令的意思是把一个常数存入特殊寄存器W, 这个常数是3,后面的H是表示十六进制
movwf GPIO 指令的意思是把特殊寄存器W的数值存入寄存器. 这个寄存器的名称是 GPIO
这里涉及到两个概念,常数和寄存器.
常数好说,比如说十进制数 35, 26 但要注意,在单片机系统里我们一般不用十进制,而使用十六进制. 有关数制转换方面的知识,是计算机的基础,必须会熟练地在二进制、十六进制、十进制之间转换,我就不罗索了.
寄存器也叫单片机的内存。
一个寄存器可以存储的数值范围是0--255,用十六进制表示就是 0---FFH.用二进制表示就是00000000----11111111.
以后要养成习惯用十六进制表示数.
那么,一个单片机里有多少个这样的寄存器哩,pic12ce512里面有1024个这样的寄存器可以供你使用,为了使用方便生产商已经给它们编上了号码,第一号码是000H,往下依照次序为 001H,002H........3FFH.(怎么样,开始用十六进制说事了吧,如果你不熟悉熟制转换赶紧补课来得及)
有了编号就像我们居住的房间有了房间号码,使用就方便的多了.房间号码在邮政行业叫地址,因此我们称这些号码叫做寄存器地址,或称地址数 例如 名称为 GPIO 的寄存器,他的地址,或地址数是 06H 。所以我们的两个例句完全等同于:
my_name006: movlw 02h '常数2进入w
movwf 06H 'W 的数进入 寄存器GPIO
'-----------------------------------------
有两个寄存器比较特殊,它们没有地址,一个名字叫做 W, 另一个叫做 TRIS. 所以他们两个在存储数据的时候比较快,一个指令就可以解决问题,例如: movlw 03H 一条指令就把常数3写入到W寄存器了。关于TRIS寄存器,我们以后用到它再说.
除了他们两个以外的其他所有寄存器,在写入数据时一般都要用两条指令进行。
今天就扯到这里,虽然只有两个指令,但主要目的是要同学们接触一下指令,建立寄存器的概念以及他们同硬件部件的联系。增强学习的信心。能有这些体会,这一节就算过关了。
随着以后的深入,你会发现小小单片机里面是一个大世界,兴趣也由此而生。
我们上一次讲的两个指令是是如何控制管脚电平的高低。前提是所有管脚已经被定义成输出了(OUT)如果被定义成了输入,则上次的指令虽然也能运行,但运行后丝毫不能改变管脚电平高低,因为此时管脚是输入状态,电平取决于外部输入,指令无法改变。
在PIC单片机系列中,改变I/O口的输入输出依靠写入寄存器TRIS的值,相应位写0,表示对应管脚被定义成了输出,写1,就是输入。
现在假如预把GP1、GP2管脚定义成输出,其他脚全是输入。那就应该向TRIS 寄存器写入二进制数 11111001,换算成十六进制就是
F9H.
依照以前我们学到的知识,在PIC系列单片机里,本来应该用下列的语句来完成我们的设定:
movlw 0F9H '常数进W 以字母开头的常数前面必须加0
movwf TRISA '把W内的数复制到TRIS
实际上PIC系列的单片机也都是这么写的,后面加的A,表示第一个8位的口(有的单片机不仅一个口,还有好几个8位的I/O口如TRISB TRISC TRISD等等) .
但是,记住了, PIC12系列的单片机必须改写成为:
movlw 0F9H '常数进W 以字母开头的常数前面必须加0
tris GPIO '把W内的数复制到TRIS 以后凡见到这个指令一律理解成 movwf TRISA
写法不同,意思是一样的. 这样你就又学了一个指令TRIS,不过这个指令的实质还是你曾经学过的movwf 只是写法不同罢了.
在PIC12系列里TRIS作为指令, 在其他系列(PIC161718)里把 TRIS 作为普通寄存器看待.
因为我们现在讲的就是PIC12CE519,所以我们暂时用
tris GPIO
这个格式,等以后进入PIC16C877 我们再写成 movwf TRISA , 至于理解按照后者进行.
'-----------
如果我们要控制GP1 GP2管脚的输出电平, 其他管脚作为输入.并且让GP1输出低电平,GP2输出高电平.完整的程序如下:
movlw 0F9H '常数进W
tris GPIO '把W内的数复制到TRIS ,GP1 GP2为输出,其他为输入
'此行无命令,起到的作用是容易读懂程序
movlw 04H '常数4的二进制是 00000100 ,GP1=0 GP2=1
movwf GPIO 'W内的数进GPIO 输出生效,原来定义成输入的脚的电平,不会受该句影响
上面已经学会了三条指令,但是8位寄存器的概念概念一定要建立起来,程序通过写入寄存器不同的数据
控制管脚作为输入使用还是输出使用,作为输出时是输出高电平还是低电平。
这样的操作又一个特点,就是每次写入数据,同时控制的往往不是一个管脚,而是好几个个.最多一次可
以控制8个管脚.在单片机里往往每8个脚叫做一个口,如口A, 口B,用英文表示就是GPIO PORTA PORTB PORTC 等.
更多的情况是:某个口内的某一个管脚需要改变电平,其他脚电平不变.例如我们仅需要GPIO口上的GP1
这个管脚的电平拉高,其他管脚电平不发生变化.这时候位操作指令为我们提供了方便,假如我们事先已经把GP1管脚定义过输出了(方法见前面讲过的):
bcf GPIO,GP1 '注释 GPIO口上GP1管脚电平拉低,我们行话叫 清除。
bSf GPIO,GP1 '注释 GPIO口上GP1管脚电平拉高,我们行话叫 置位。
怎么样,这样控制某一个管脚的电平就方便多了,你的编程效率大大提高啊.
记住:PIC所有单片机所有寄存器都是可以位操作的,这在51的单片机上是不能完全实现的.
不仅如此,PIC所有单片机所有管脚的单腿驱动输出电流可以高达 25mA,所以如果你驱动一个 5到10mA电流的LED发光二极管,根本不用加三极管,串个电阻直接挂在单片机上就得了,这在51的单片机上也是不能实现的,要加驱动三极管或驱动芯片.
怎么样,学PIC有好处吧. 也别急,好处还有那,且听我慢慢地白话。
一不小心,你已经会 5 个指令了,还有30个,加油啊。
继续
单片机的大部分指令,或者说单片机所做的大部分工作,多数在写入或读出寄存器。关于寄存器的初步概念我想我们已经建立起来了,它是一个能够存储8位二进制数据(最大255 = 0FFH) 的单元 每个单元都有它的编号,我们叫做它的地址,或地址编码. 地址编码也是十六进制的. 另外寄存器里的数据掉电就会丢失。
寄存器的英文是RAM 也要记住.
PIC12CE519 里面共有有48个寄存器供我们操作使用, 它们每一个都有固定的地址编码。
地址编码并不是连续的号码,而是分成了两段:
第一段: 从00H 开始, 依次是01H, 02H, 03H ....0AH, 0BH......到1FH 结束. 计32个寄存器
第二段: 从30H 开始, 依次是31H, 32H, ......................到3FH 结束 计16个寄存器
这种地址不连续编号, 而是要跳过去一段的做法, 对于我们新手来说很是不习惯. 为了让我们容易入门, 我们暂时先不管第二段RAM, 只当它不存在, 所有程序我们只涉及到第一段连续的ram 地址. 等我们熟练的掌握好了ram 的使用,再涉及第二段地址的RAM, 那时,你就会理解单片机设计者把它们分成两段的苦心了.
为了规范,我们今后一律把RAM的分段, 叫做分页. 第一地址段叫00页面, 第二地址段叫01页面.
例如: 我们学过的 I/O 口电平控制寄存器 GPIO, 它的地址编码是 06H, 属于00页面.
'-----------------
所有这32+16=48个寄存器除了在地址上分成了两个页面以外,又把它们分成两类:
一类专用寄存器,一类通用寄存器.
所谓专用,就是这个寄存器的功能已经由系统分配好了.例如 地址为06H 的名称就做GPIO寄存器的功能,是它的每个位,都对应到一个I/O脚的电平.
另一类 是通用寄存器,你可以理解成它的功能系统没有事先预定,而是由你在编程序的时候随机使用.
pic12ce519 的专用寄存器有 7 个, 位置在我们第00叶面的最前面. 这7个专用寄存器的地址编码是: 00H,01H, 02H, ----06 H
剩下的所有寄存器包括所有第01页面, 全部都是通用寄存器.
例子: 在两个通用寄存器 09H, 0AH 内, 写入常数 FC H
movlw 0FCH '常数进W
movwf 9H '复制W内的数到通用寄存器09H
movwf 0AH '复制W内的数到通用寄存器0AH 由于此时W内并没有改变,W不用再进常数.
'----------------------------------------------
下面是PIC12CE519的 寄存器ram的地址地图:
图最上端的 00 01 表示的是页面号码,或叫页面地址。
左侧 从00 --- 1FH 是00页面, 右侧是01页面。
从00H 到 06H 都已经起好了名称 ,它们是专用寄存器,用处各有不同。以后我们会逐个介绍它们
剩下的都是通用寄存器 或者叫普通寄存器 General Purpose Registers 意思是一般用途的寄存器
地址从20H 到 2FH 也不是“空洞”,也不是不能访问,只是读写它们的时候等于读写它们左侧对应的00页面。这一点我们可能有些迷惑,弄不明白也没有关系,以后随着程序理解的深入,会搞清楚的。
内存图谱,不要求记下来,但是应该有个大体印象,用的时候会察看就可以了。等编程时间一长
就那么几个字节,自然就记住了。
所谓字节是衡量二进制数据长度的一个单位。一个寄存器刚好能记住一个字节的数据。如果你要存储的数据比较大超过了255,那就要占2个存储器甚至更多。描述的时候通常我们不说这个数值占了多少个寄存器,而是说这个数据是几个字节的。
字节的英文是byte 一个二进制数的一位,叫比特 英文bit 1 byte 包含 8 bit
继续
下面我们学习一条新指令,叫做空操作指令
nop '什么事情也不做,但执行这个指令也要消耗掉一点时间。它没有操作数。
'不要理解成程序停了,实际上程序仍在正常运行。执行一连串的空操作指令,单片机
'白耗费时间,什么活也不干,往往用于延时
如果你需要一个很短时间的延时,可以采用一连串的空操作。注意每个 nop 也是占一行, 例如:
movlw 0F9H '常数进W
tris GPIO '把W内的数复制到TRIS ,GP1 GP2为输出,其他为输入
bsf GPIO,GP1 '管脚GP1输出高电平点亮LED灯(如果你已经接上灯的话)
nop
nop
nop
nop
nop
... .
bcf GPIO,GP1 '管脚GP1输出低电平关闭LED灯
nop
nop
nop
nop
...
运行的效果是接在管脚GP1上的LED灯先亮一段时间,再熄灭一段时间的闪烁。
这回再说一个程序转向的语句,goto 指令,学过basic 和 c 等语言的对它不陌生。
单片机对程序的执行是逐句自上而下进行。当它运行到某个位置,如果你不希望继续运行它下面的语句,而是希望它无条件的强行转到某一句上,就可以使用goto语句。
我们还是通过例子来说明goto 的使用方法。
已知外部晶振的频率为4 MHz, 设计程序从pic12ce512 单片机的GP1管脚上输出一个方波信号,信号频率固定并计算出频率的值。
movlw 0F9H '常数进W
tris GPIO '把W内的数复制到TRIS ,GP1 GP2为输出,其他为输入
myWAVE: bsf GPIO,GP1 '管脚GP1输出高电平点亮LED灯(如果你已经接上灯的话)
nop
nop
nop
nop
nop
nop
nop
bcf GPIO,GP1 '管脚GP1输出低电平关闭LED灯
nop
nop
nop
nop
nop
goto myWAVE 'myWAVE是标号,某行必须有这个标号,否则程序通不过
nop '由于goto的存在,以下语句得不到运行
nop
nop
当程序自上而下运行到goto 语句时, 不再继续运行它底下的语句, 而是让程序强行转向到标号为myWAVE的语句上,并继续运行.
这样一来的结果,程序会永远在标号myWAVE的这一句 bsf GPIO,GP1 到goto之间循环, 打转转.







评论