基于MEMS传感器的运动物体轨迹仿真研究
加速度传感器的各轴输出依赖于角速度,在圆周运动切线方向速度的大小如式(1):
本文引用地址:http://www.eepw.com.cn/article/201706/361130.htm (1)
(1)
其中,vqie表示圆周运动方向的速度,w0表示转台运动的角速度,r表示旋转半径。
传感器Y轴加速度近似由切线速度的微分得到;传感器X轴加速度近似是圆周运动的法向加速度,大小如式(2):
 (2)
(2)
其中,a表示法向加速度大小,w0表示驱动转台运动的角速度,r表示旋转半径。传感器Z轴加速度近似为重力加速度,即1g。
1.2 仿真传感器数据生成
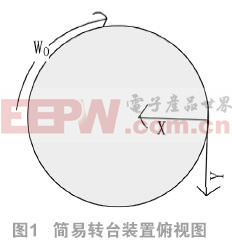
根据实际转台运动情况,在仿真中虚拟与实验装置一致的转台,其运动角速度w0运动过程为:静止—匀加速运动—匀减速运动—停止,以此产生三轴加速度和三轴角速度:初始俯仰角pitch=0.1°,初始偏航角yaw=0.1°,初始翻滚角roll=0°。传感器X轴在转台平面的投影沿转台半径方向指向转台圆心,Y轴在转台平面的投影沿转台运动方向,Z轴在竖直方向的投影与重力方向一致,且X、Y、Z三轴符合右手螺旋定则;同理,仿真传感器三轴角速度仍是矢量合成运算,各轴输出为:
传感器X轴角速度:

传感器Z轴角速度:
 (5)
(5)
由于初始倾角的存在,加速度传感器各轴输出均为重力加速度与圆周运动切线加速度和法向加速度分别在各轴分量之和。加速度各轴输出表达式如下:
传感器X轴加速度:

仿真中传感器各轴输出的曲线变化规律和实测结果是一致的,只是整个过程时间有所不同。图2~图7是仿真传感器三轴角速度输出和实测传感器三轴角速度输出对比图。

2 仿真算法框图
要得到运动物体每一时刻的姿态信息,需要用到姿态更新矩阵,从而引入了四元素法。需进一步求解四元素微分方程,采用定时采样角增量算法求解[11]。首先根据陀螺输出的角速度数据求得每一姿态下的四元素,再根据姿态矩阵和四元素之间的关系获得更新后的姿态矩阵,将传感器坐标系下的加速度数据转换到参考坐标系,去重力后进行速度,位移积分获取轨迹[12]。图8是仿真算法框图。
而在实测数据轨迹重构时,首先对加速度计进行零偏和标度因子的校准,再进行小波去噪,滤去高频噪声;对陀螺输出角速度滤波后,再进行后续姿态解算过程。

3 仿真结果和实际轨迹对比分析
通过模拟传感器在转台上的运动,利用算法解算出了其运动轨迹近似为圆,图9和图10给出了其三维轨迹以及在平面上的投影曲线,并且与实测数据获得的三维轨迹图和平面投影对比分析。

仿真平面投影中,X轴方向的直径为25.5cm,Y轴方向的直径为25.2cm。由于重力加速度不能完全去除干净,可以看到,在仿真三维图中,Z轴方向还有位移偏移存在,这可能与算法采用的定时采样增量有关,仿真过程和实测过程中,采样周期均为2ms,时间间隔长导致的积分累积误差使得仿真结果与理想转台直径25cm存在一定的误差。
而影响实测结果的因素主要有:积分累计误差和陀螺严重的漂移。使得实际在转台上运动测得数据得到轨迹和仿真结果差距很大。仿真中给传感器输出施以强度为1的高斯随机噪声,画出轨迹如图11;当噪声强度逐渐增大时,轨迹在平面上二维投影不能重合(如图12)。

当对仿真角速度设置同实验测得陀螺一样的零偏时,得到轨迹发生很大变化,如图13~图15。
当仿真中增加角速度零偏情况下时,轨迹投影如图13,地理坐标系Y轴速度变化如图14,与图15中仿真时无角速度偏置的情况相比,可发现当仿真中带有角速度零偏时,无法画轨迹,且地理坐标系Y轴速度是时间的二次曲线,方向一直不变;对比地理坐标系Y轴速度和实测数据地理坐标系Y轴速度发现,仿真地理坐标系Y轴速度先增加再减小再增加再减小至零,而实测情况下地理坐标系Y轴即运动方向速度在经历先减小后增大后并没有再减小,反而继续增大,通过计算时间知道此刻传感器随转台恰巧旋转了半周,就发生了离心运动,导致轨迹描绘不理想,这也可从上述实测三维轨迹图中看出。
4 结论
MPU6050传感器本身精度较低,陀螺漂移严重,所以只能短时间观测物体运动轨迹;从图13、14、15对比可以发现这种传感器不能做单一方向转动,随着时间延长,陀螺漂移对其影响很大,不能正确寻迹,所以它适用于短时间低速运动场合。为获得更精确的运动轨迹,需要高精度的传感器或者对陀螺漂移做很好的修正,如增加速度监测器以补偿传感器运动速度,使其保持在轨运动速度;这将成为以后研究工作的关键。
参考文献:
[1]杨清,陈岭,陈根才.基于单加速度传感器的行走距离估计.浙江大学学报(工学报),2010,44,(9):1681-1686.
[2]宋丽君.基于MEMS器件的航向姿态测量系统的研究[D].西北工业大学,2007.
[3]任明泉.基于加速度传感器的运动物体轨迹检测系统的研究[D].南京邮电大学,2013.
[4]胡三庆.基于MEMS加速度传感器的空间运动轨迹追踪系统设计与实现[D].华中科技大学,2009.
[5]P B,B M,E A,et al.Calibration verification of a low-cost method for MEMS accelerometer [J].IEEE transaction of the institute of measurement and control, 2014, 36(5):579-587.
[6] I Frosio,F Pedersini,N A Borghese.Auto calibration of MEMS accelerometers[J].IEEE Transaction of the institution of measurement and control,2009,58(6):2034-2041.
[7]李鹏飞,肖金壮,王洪瑞.马运动轨迹复现方法及其应用研究[J].微型机与应用,2011,(21):69-71.
[8]赵翔,杜普选,李虎等.基于MEMS加速度计和陀螺仪的姿态检测系统[J].铁路计算机应用,
2012,21(3):15-18.
[9]张文瑞,张丕状,翟子雄.一种基于六姿态模型的加速度计校准方法研[J].传感器与微系统,2016,35(3):37-39,48.
[10]翟子雄,张丕状,张煜林.基于椭球假设的MIMU现场标定方法[J].中国测试,2015,12:25-27+48.
[11]秦永元.惯性导航[M].北京:科学出版社,2006:300-303.
[12]陈建新,卜翔,王荣,等.基于MEMS加速度的三维无线鼠标设计与实现[J].无线互联技,2011,(8):22-25.
本文来源于《电子产品世界》2017年第7期第62页,欢迎您写论文时引用,并注明出处。



评论