基于车载自组网络模式的小车互联模型设计方案
1、设计背景
“robot”一词源自捷克语“robota”,意谓“强迫劳动”。1920年捷克斯洛伐克作家萨佩克写了一个名为《洛桑万能机器人公司》的剧本,他把在洛桑万能机器人公司生产劳动的那些家伙取名“Robot”,汉语音译为“罗伯特”,捷克语意为“奴隶”——萨佩克把机器人的地位确定为只管埋头干活、任由人类压榨的奴隶,他们存在的价值只是服务于人类。他们没有思维能力,不能思考,只是类似人的机器,以便使人摆脱劳动。
1946年,美国的德沃尔发明了一种系统,可以“重演”所记录的机器的运动。1954年,德沃尔又获得可编程机器手专利,这种机器手臂按程序进行工作,可以根据不同的工作需要编制不同的程序,因此具有通用性和灵活性。1959年,大学攻读伺服理论的英格伯格和德沃尔联手制造出第一台工业机器人,这种机器人外形有点像炮塔,基座上有一个大机械臂,大臂可以绕轴在基座上转动,大臂上又伸出一个小机器臂,它相对大臂可以伸出或缩回。小臂顶有一个腕子,可绕小臂转动,进行抚养和侧摇。腕子前头是手,即操作器。这个机器人的功能和人的手臂的功能相似,这是世界上第一台真正的实用工业机器人。
到目前为止,机器人技术的发展过程大致可以分为以下3个阶段:
第一代为可编程示教再现型机器人,其特征是机器人能够按照事先教给它们的程序进行重复工作。1959年美国人英格伯格和德沃尔制造的世界上第一台工业机器人就属于示教再现型,即人手把着机械手,把应当完成的任务做一遍,或者人用示教控制盒发出指令,让机器人的机械手臂运动,一步步完成它应当完成的各个动作;
第二代机器人(20世纪70年代)是具有一定的感觉功能和自适应能力的离线编程机器人,其特征是可以根据作业对象的状况改变作业内容,即所谓的“知觉判断机器人”;
第三代机器人(20世纪80年代中期以后)是智能机器人,这种机器人带有多种传感器,能够将多种传感器得到的信息进行融合,能够有效的适应变化的环境,具有很强的自适应能力、学习能力和自治功能。
而对于机器人领域的一个分支——移动机器人,它的研究始于60年代末期,斯坦福研究院(SRI)的Nits Nilssen和Charles Rosen等人, 在1966年至1972年间研制出了名为Shake的自主移动机器人。
进入20世纪80年代以后,人们的研究方向逐渐转移到了面向实际应用的室内移动机器人的研究,并逐步形成了自主式移动机器人AMR(Indoor Autonomous Mobile Robot)概念。美国国防高级研究计划局(DARPA)专门立项,制定了地面天人作战平台的战略计划。从此在全世界掀开了全面研究室外移动机器人的序幕,如DARPA的“战略计算机”计划中的自主地面车辆(ALV)计划(1983—1990),能源部制订的为期10年的机器人和智能系统计划(RIPS)(1986—1995),以及后来的空间机器人计划:日本通产省组织的极限环境下作业的机器人计划:欧洲尤里卡中的机器人计划等。初期的研究,主要从学术角度研究室外机器人的体系结构和信息处理,并建立实验系统进行验证。虽然由于80年代对机器人的智能行为期望过高,导致室外机器人的研究未达到预期的效果,但却带动了相关技术的发展,为探讨人类研制智能机器人的途径积累了经验。同时,也推动了其它国家对移动机器人的研究与开发。
在国内,从“七五”开始,我国的移动机器人研究开始起步,经过多年来的发展,己经取得了一定的成绩。清华大学智能移动机器人于1994年通过鉴定。涉及到五个方面的关键技术:基于地图的全局路径规划技术研究(准结构道路网环境下的全局路径规划、具有障碍物越野环境下的全局路径规划、自然地形环境下的全局路径规划);基于传感器信息的局部路径规划技术研究(基于多种传感器信息的“感知一动作”行为、基于环境势场法的“感知一动作”行为、基于模糊控制的局部路径规划与导航控制);路径规划的仿真技术研究(基于地图的全局路径规划系统的仿真模拟、室外移动机器人规划系统的仿真模拟、室内移动机器人局部路径规划系统的仿真模拟);传感技术、信息融合技术研究(差分全球卫星定位系统、 磁罗盘和光码盘定位系统、超声测距系统、视觉处理技术 信息融合技术);智能移动机器人的设计和实现(智能移动机器人THMR—111的体系结构、高效快速的数据传输技术、自动驾驶系统)。香港城市大学智能设计、自动化及制造研究中心的自动导航车和服务机器人。中国科学院沈阳自动化研究所的AGV和防爆机器人。中国科学院自动化所自行设计、制造的全方位移动式机器人视觉导航系统。哈尔滨工业大学于1996年研制成功的导游机器人等等。
但是,在国内并没有哪个大学或组织侧重于研究智能移动机器人间的通信。尤其在汽车行业越来越智能化的今天,把我们已有的导航机器人、视觉导航系统等等,通过无线自组网应用到汽车通信领域显得尤为重要。开发这样一种网络就需要ad-hoc技术和当今国际研究热点——802.11p协议。
Ad-Hoc的英文原意是“特别的、特定的”,Ad-Hoc网络是建立在特定场合的无线网络,由路由器Router和主机Host组成,这些节点可以任意移动位置,因此网络的拓扑结构是任意而不可预测的。Ad-Hoc网络的应用场合非常广泛,早期应用于军队、警察、救护等系统中,这些场合情况紧急,时常伴有灾难和危险。1972年,美国DARPA(Defense Advanced Research Project Agency)就启动了分组无线(PRNET,Packet Radio NETwork)项目,研究分组无线网在战场环下数据通信中的应用。项目完成之后,DAPRA又在1993年启动了高存性自适应网络(SURAN,Survivable Adaptive Network)项目,研究如何将PRNET的成果加以扩展,以支持更大规模的网络,还要开发能适应战场快速变化环境下的自适应网络协议。1994年DARPA又启动了全球移动信息系统(GloMo,Globle Mobile Information Systems)项目。在分组无线网已有成果的基础上对能够满足军事应用需要的、可快速铺设、高抗毁性的移动信息系统进行全面深入的研究,并一直持续至今。
早前提出的移动自组织网络(MANET)是一种自治的网络,移动节点可以在飞机、船舶上,也可在卡车、小汽车上。从这一意义上来说,车载自组织网络(VANET)完全可以看作是移动自组织网络MANET的一个重要分支。车辆自组网与传统无线通信系统相比较,具有车辆高速行驶、信道快速衰落、多普勒效应严重、网络拓扑变化快等特征,这些也都是当前无线移动通信面临的主要难题。
把Ad-Hoc技术和移动自组网的概念应用到汽车通信领域成为一种趋势,车载环境无线接入(WAVE)被视为下一代专用短距通信(DSRC)技术,能够提供高速的车到车(V2V)和车到中心台(V2I)数据传输,主要可以用于智能交通系统(ITS),车辆安全服务以及车上因特网接入。WAVE系统工作于5.850~5.925 GHz,采用OFDM传输技术,能够达到3~27Mbit/s的信息传输速率。在WAVE系统中,一个路侧单元(RSU)可以覆盖方圆1 000英尺。WAVE系统就是基于IEEE 802.11p协议,此系统就能克服以往车载自组网络具有车辆高速行驶、信道快速衰落、多普勒效应严重、网络拓扑变化快等特征。
2、设计目的
1994年,美国的一个机器人丹蒂(Dante)探索了南极洲的埃力柏斯火山口,这无疑是智能机器人最新技术的示范。该探险行动实际上是由相互协作的两个机器人来执行的。其中一个是善于爬坡的运输机器人,把丹蒂从营地送到火山口边缘,然后丹蒂用攀登绳索下去取样。虽然该项行动遇到故障,但是人们普遍承认该机器人系统是成功的。
事实上,这是代表当前智能机器人最高水平的自主式移动机器人(AMR)系列中的一个。自主式移动机器人,它要求在野外非结构化环境中自主地执行一系列任务,例如侦察、探险、搬运等等。环境变化的不确定性意味着机器人必须有良好的环境感知、行动规划与决策、灵巧的机动控制等功能。涉及的技术领域包括机器视觉、多传感融合、全局与局部控制、学习与决策,以及机械构造、运动学与动力学控制等。
我们研究设计的智能小车,不仅可以用于野外探险,还可用于楼宇、仓库等一般场合,以及用于、矿井、防爆、毒气泄漏等恶劣环境。
智能小车上实现了实时视频采集及无线传输,可以方便的实现对目标环境的远程监控,在安防、交通、智能楼宇等领域有很好的应用前景。
对于汽车行业飞速发展的今天,拥有私家车的人群越来越多,而避免交通事故显得尤为重要,我们研究的小车相互之间可以自动传送警告信息,减小了交通事故的发生率;采用的通信协议—802.11p也是国际上的研究热点。
下图为探险者利用智能小车探路的模型化表示:

图1 智能车在探险中应用的模型化表示
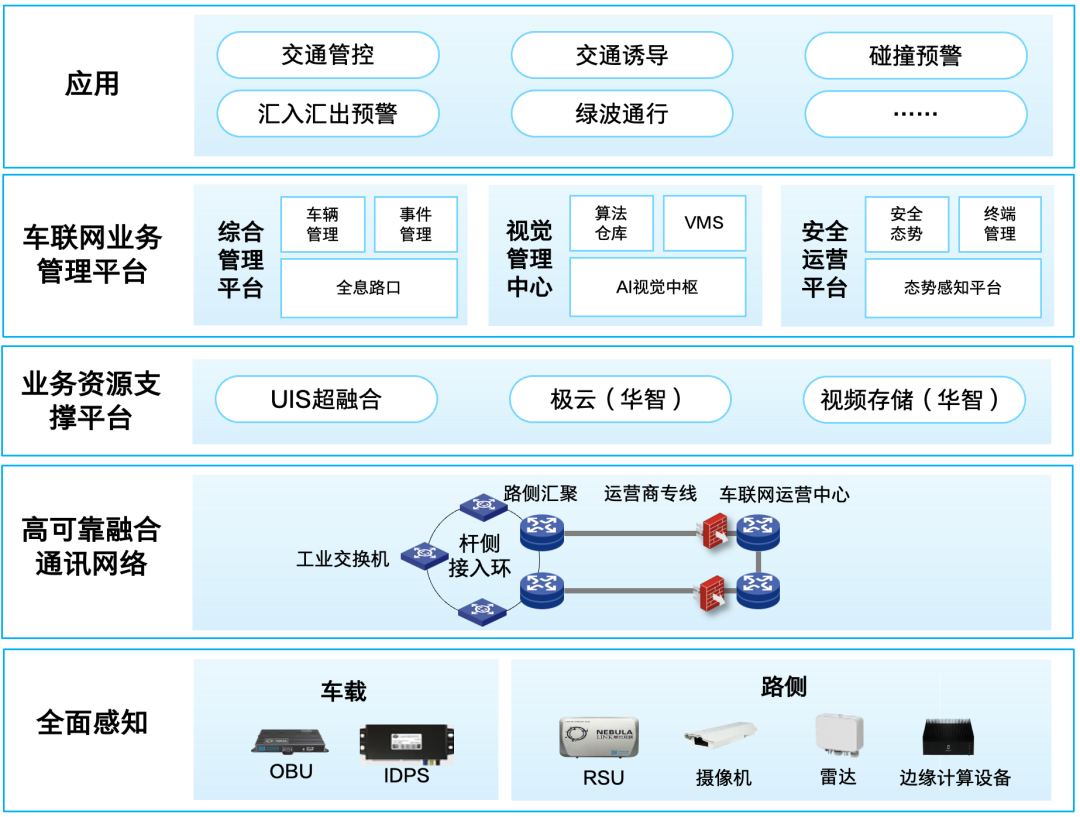
下图为基于802.11p协议的车载自组网在高速公路上的应用方案:
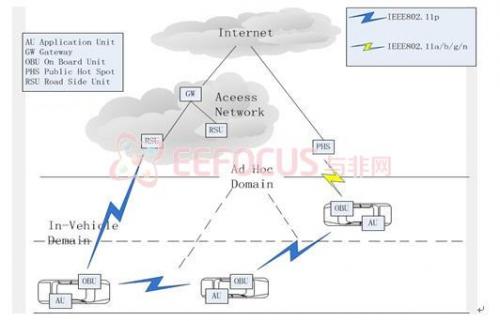
图2 802.11p的车载自组网应用方案
方案论证
此智能小车主要完成基本功能和扩展功能:基本功能是必须完成的功能,扩展功能可以根据时间和难度做出适当的剪裁。
基本功能:
- PC通过ad-hoc网络向小车发送控制命令到小车的控制中心(单片机),控制中心控制步进电机,从而控制小车的转向和速度;
- 小车在行走的过程中,能够实现自动避障,通过超声波传感器,把障碍物信息传给单片机,单片机控制电机,使小车停止行走或倒退;
- 前方小车遇到障碍物时,完成避障的同时,由单片机通过ad-hoc网络传给PC和另一辆小车,实现预警功能;
- 小车上的视频采集系统,把采集到的路况信息传给控制中心,经过一定的视频压缩处理后,控制中心通过ad-hoc网络把路况信息传给PC;PC端解压后,可以根据路况信息控制小车的动作;
- 在PC上集成了控制软件,并通过可视化窗口,能够观察采集回来的视频信息,从而可以控制小车的动作。
扩展功能:
- 在小车实现自动避障的基础上,小车能够以最佳路线绕过障碍物,并能防止滑落;最终实现在一定环境下(包括障碍物和滑坡)两辆小车可以在一定的速度范围内无差错行走;
- 在小车上实现无线定位系统,PC上可以看到小车在整个地图中的位置信息,并能根据小车的移动,做出相应的更新;
- 小车与小车之间构建一个Zigbee网络,这个网络用于收集周围的环境信息,并组成车载自组网络,给单片机留更多的资源来进行视频传输及对传感器信息的融合处理;
- 小车通过图像处理技术完全自主行驶,能识别和测量周围的物体,理解周围环境和所要执行任务的能力,并作出正确的判断及操作和移动等能力。
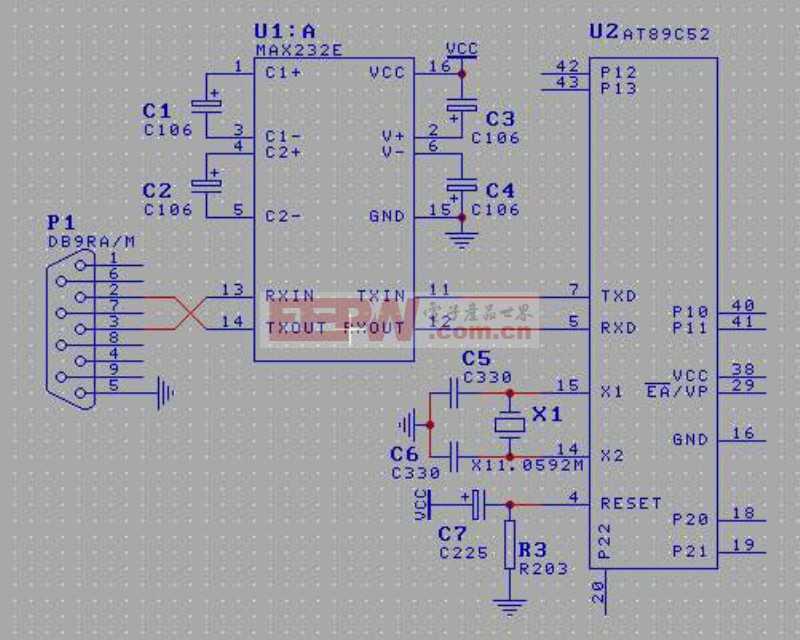
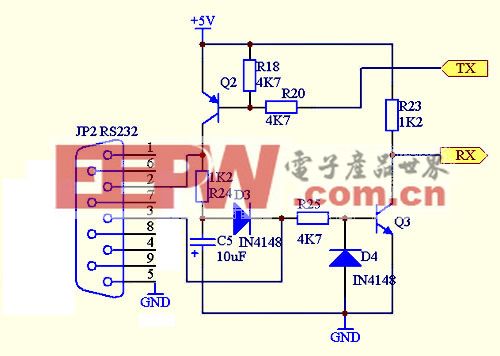
一、硬件部分
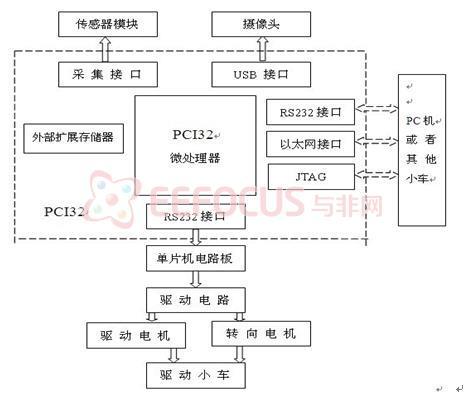
图3 系统的整体设计框图
二、软件部分
(1)软件构架
方案一:采用实时操作系统μC/OS-Ⅱ,“实时”两个字的意思就是对响应时间有严格的要求。实时操作系统贵在实时,要求在规定的时间内完成某种操作。主要用在工业控制中。具有:高精度计时系统;多级中断机制;实时调度机制,包括两个方面,一是在调度策略和算法上保证优先调度实时任务;二是建立更多“安全切换”时间点,保证及时调度实时任务。
方案二:采用无操作系统算法,一般没有明显的操作系统支持,而是通过汇编语言编程对系统进行直接控制。主要特点是系统结构和功能都相对单一,针对性强,无操作系统支持,几乎没有用户接口。
根据两种方案的特点,选用方案一作为本次设计的操作系统μC/OS-Ⅱ。
(2)通讯协议
方案一:采用IEEE802.l1p标准,IEEE802.11p(又称WAVE;Wireless Access in the Vehicle Environment)是一种由IEEE 802.11标准发展而来的通讯协议。这个通讯协议主要用在车用电子的无线通讯上。它又对IEEE802.11扩充延伸,来满足ITS系统(Intelligent Trans- portation Systems,ITS)相关应用的需求,802.11p将用在车载通讯(或称专用短距离通讯,Dedicated Short Range Comu- nication,DSRC)系统中。IEEE802.l1p标准主要是解决移动的Ad-hoc网络快速连接高频率切换问题和新的安全问题。从性能上看,802.11p最高传输速率可以达到27Mbps,传输范围达1000米。
方案二:采用IEEE802.11a标准,IEEE802.11a工作于5GHz的U-NII频段,该标准使用OFDM(正交频分复用)调制数据,物理层速率可达54Mbps,传输层可达25Mbps。其具有较少冲突的特点,因为2.4GHz 的频带已经被广泛使用。但在上飞速行驶的汽车和复杂的道路状况给物理层带来了很大的挑战,在移动的Ad-hoc网络快速连接高频率切换问题和新的安全问题上IEEE802.11a标准显得有点无力
根据两种方案的特点,选用方案一作为本次设计的操作系统μC/OS-Ⅱ。
(3)软件流程图
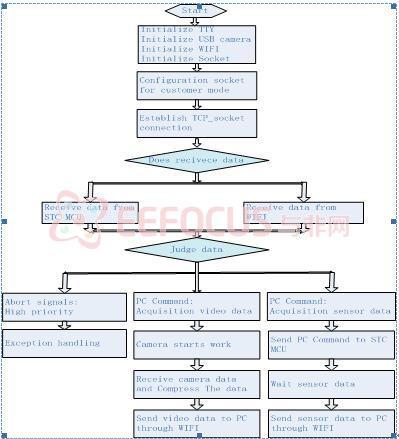
图4 软件流程图
作品优势
设计方法和过去采用传统的方法相比,具有以下明显优势:
(1) 电路简单,可靠性强。Digilent Cerebot™ 32MX4开发板是一个功能强大的微控制器开发板,具有一个全新Microchip® PIC32™微控制器,具有大量的I/O接口和电源选项;
(2)采用mC/OS-Ⅱ实时操作系统。响应时间短,能提供及时响应和高可靠性;支持多任务,具有任务优先级,任务调度是基于优先级的抢占式调度和时间片轮转调度的算法;具有多种中断级别,方便管理小车的各种行为;
(3)基于802.11p协议组建无线网络。802.11p协议是一种由IEEE 802.11标准发展而来的通讯协议,这个通讯协议主要用在车用电子的无线通讯上,来满足ITS系统(Intelligent Trans- portation Systems,ITS)相关应用的需求;
(4)人机界面良好,操作简单。PC上集成了控制软件,可以几乎无延时看到智能小车
采集回来的视频信息,并通过软件上的按键控制摄像头的偏移、小车的转向和速度等。
PC机上的控制软件demo如下图所示:
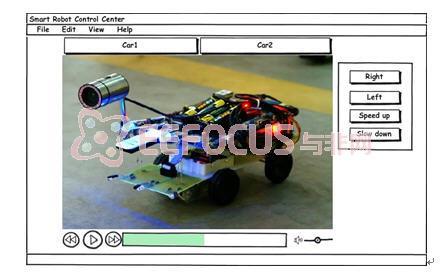
图5 控制软件demo










评论