相电压重构方法在异步电机上的应用
引言
本文引用地址:http://www.eepw.com.cn/article/201703/345091.htm随着科技的发展,新能源产业得到了世界各国的大力推广,作为该产业中的重要组成部分,电机驱动受到了广大学者的关注[1,2]。异步电机具有高效、节能、可靠性好、成本低等优点,被广泛应用于工业、农业、军事等各领域。由于异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统,因此上个世纪60年代出现了矢量控制,实现了异步电机的解耦控制[3,4]。对于一些精度要求不高的场合,矢量控制中采用速度传感器会增加成本,因此采用无速度传感方式的矢量控制可很大程度上降低开发成本。采用电压模型法的无速度传感方式具有良好的性能[5],但因为需要采集三相电压,很大程度上增加了成本和硬件电路的复杂程度。因此,本文采用电压重构的方法,利用母线电压和三相PWM占空比构造三相电压,以此进行磁链和速度的估算,仿真和实验结果表明了该方法具有较好的实用性。
1三相电压重构原理
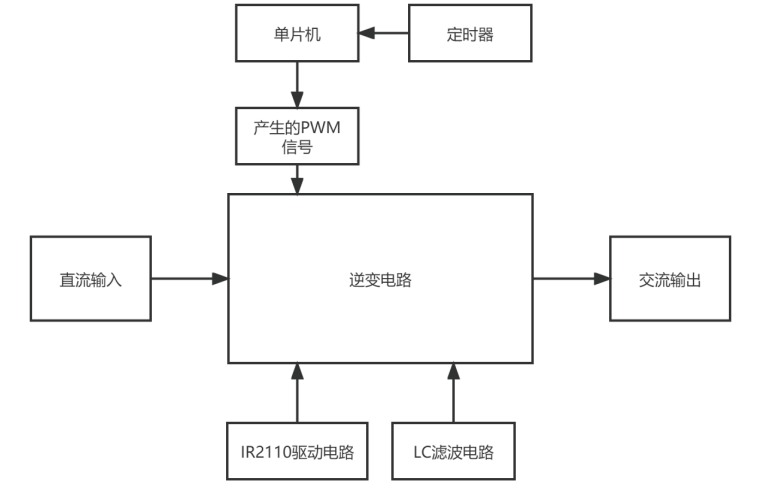
电机逆变器结构图如图1所示,设异步电机三相电压为Van,Vbn,Vcn,电机中心点电压为Vn。

图1.电机逆变器结构图
电机三相电压可以表示为:

其中R为定子电阻,L为定子电感,ea、eb、ec为三相反电势。
当采用三线制接法时,三相电流和、电势和为零,因此将三相电压相加可得

由结构图可知,Va,Vb,Va可以由直流母线电压Udc与VT1,VT3,VT5开关函数Da,Db,Dc构造而来,其具体表示为

2 SVPWM调制下占空比的计算方法
2.1 扇区判断
由参考文献[6]可知,合成电压空间矢量的两个有效矢量T1,T2和零矢量T0的作用时间位为

本文采用7段式PWM波控制方式,传统的扇区计算需要用到三角函数公式,导致软件处理时花费大量的时间,本文采用新型的扇区判断方式,使计算更为简便,具体的计算方法如下。将电流经过处理后得到α轴和β下的电压分量Vα和Vβ,由图2可知三个基本电压Ua,Ub,Uc 为


图2. 电压Ua,Ub,Uc对应扇区
因此,可以根据Ua,Ub,Uc的大小关系即可判断矢量所处扇区,如表1所示

2.2 PWM占空比及三相电压计算
以第一扇区为例,如图所示

图3.第一扇区矢量合成图
根据正弦定理可得

根据七段式PWM波,可计算得到各矢量切换点为

3仿真及实验
为了验证理论分析的正确性,搭建了Matlab/Sinmulink仿真模型,采用电压模型法的无位置矢量控制方式,以一台三相异步电机为控制对象,进行了仿真验证。PWM频率设置为5K,周期为0.0002s。仿真结果如图所示,图4为A相占空比对应的马鞍波形,图5为电机输出端电压经过Clarke变换之后的波形,图6为重构后得到的相电压经过Clarke变换之后的波形,从图中可以看出定子相电压实际输出波形为阶梯波,重构得到的电压为正弦波,两者具有相同的相位与有效值。

图4. 上桥臂占空比

图5.实际测量相电压clarke变换输出

图6.重构后相电压clarke变换输出
4 试验结果
为了验证理论分析正确性以及系统方案的可行性,基于TI DSP28069搭建了电机控制平台,利用相电压重构方法,结合异步电机无位置传感方案,进行了实验验证。其中图7为电机启动电流波形,图8为电机运行由空载到额定负载电流变换波形,图9为电机稳定时电流波形,从图中可以看出,采用电压重构方法对异步电机进行无位置传感控制,可以实现对电机启动,突加负载等控制,能够保证电机控制的良好动态性能。

图7. 电机启动电流波形(2A/格)

图8.负载突变电流波形(10A/格)

图9.稳定运行电流波形(10A/格)
5结论
通过对三相电压重构方法的推导分析,结合SVPWM调制方式,给出了三相电压重构在异步电机无位置矢量控制方式上的应用,仿真和实验验证了该方法的正确性和可行性。可得出以下结论:
1)利用三相电压重构方式结合无位置传感方式,可实现对异步电机的控制,很大程度上降低了硬件成本和复杂度。
2)本文涉及到的SVPWM调制中,扇区判断方法更为简便无需复杂的三角函数计算,降低了软件复杂度。
作者:
沈风1 唐建勋2
1. 国网安徽省电力公司检修公司(安徽 合肥 23006)
2.合肥国轩高科动力能源股份有限公司(安徽 合肥 230012)








评论