基于GD32F103VCT6的四轴飞行器整体方案及试飞效果
3 PID
PID分两种,位置式和增量式,我采用的是位置式,将 Ki和Kd用Ti和Td的形式来表达,并带入到式2-3中,ek=角度 的期望-传感器输出的角度,所用的PID三个参数是:Kp、 Ti、Td。公式如下所示:
四轴PID控制的目的就是将接收到的遥控的控制信号(一般有油门THR、升降舵ELE(对应pitch)、副翼Ail(对 应roll)、方向舵RUD(对应yaw))与飞控板本身计算得出 pitch、roll、yaw做比较,分别得出它们之间的误差值,然后 将Kp、Ti、Td与这个误差值结合得出PID输出(PID_pitch、 PID_roll或者PID_yaw),再将这三个PID输出与油门结合在 一起算出送到每一个电调的PWM数值,从而控制每一个电 机的转动。PID参数的调试我是用的土办法,分别对俯仰、翻滚和 偏航做PID调试,x模式下先同时上Kp和Td,光靠Kp是稳不 住四轴的,调的差不多了上Ti消除静态误差。在调这三个参 数时,要相辅相成,切忌把某一个参数固定下来,因为它们
之间都会相互影响。我们还需要考虑三个问题,这三个问题都是围绕让自己的四轴怎样转动:
1. 飞行时是使用“+”模式还是使用“x”模式;
2. 四个电机分别该如何旋转,是逆时针还是顺时针;
3 . 每 个 电 机 该 怎 样 旋 转 才 能 让 我 们 的 四 轴 上 升 、 下 降、左翻、右翻、上仰、俯冲、左转头或者右转头。
对于第一个问题来说:一般“+”模式比较好操作,也 比较好调节PID的那三个参数,而“x”模式飞行起来比较 灵活,可以做很多复
杂动作,但是比较难操作,这里我用的 是“x”模式,对于新手来说,包括我,虽然“x”模式难一 些,不过最多也就是需要时间来
学习和熟练罢了,其实也没 什么难的。
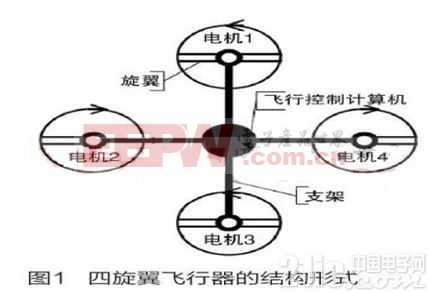
对于第二个问题:首先要确定飞控板的xyz轴正方向如 何放置,然后确定4个电机的旋转方向分别是什么,我定义 的方式如上图,Y正
方向为四轴前进方向。
M1、M2、M3、M4分别为4个电机,其中M1和M4顺时 针旋转,M2和M3逆时针旋转。
对于第三个问题:还是看上图,我定义三点:
1 . x y z 轴 的 正 方 向 为 : y 指 向 正 北 , x 指 向 东 , z 指 向 天;
2.绕y旋转是roll,绕x旋转是pitch,绕z旋转是yaw;
3.Yaw北偏西为正,pitch往上为正,roll“右翼”下沉 为正。
令:“+”表示增加该电机的旋转速度,“-”表示减小 该电机的旋转速度,那么“x”模式下的控制规律如下:

最后得出每个电机需要的PWM输出计算公式: 其中Limit_PWMOUT函数是限制PWM的输出,根据电调的
其中Limit_PWMOUT函数是限制PWM的输出,根据电调的
PWM占空比来确定。
还有一点需要注意的,就是桨叶的安装,桨叶是分正 反浆的,通俗地说,安装时要保证4个桨叶转动时都是往下 吹风的。
4 四轴零件之间的接线与简单说明
4个电调的正负极需要并联(红色连一起,黑色连1一 起),并接到电池的正负极上;
电调3根黑色的电机控制线,连接电机,交换任意两根 黑色的连线,可改变电机转动方向,以此来改变桨的旋转方 向;
电调有个BEC输出,共3根线,红、黑线用于输出5V的 电压,给飞行控制板供电,另外一根线用于接收飞行控制板 的PWMout信号;
遥控接收器连接在飞行控制器的PWMin上,输出遥控 信号给飞控板,并同时从飞行控制板上得到5V供电。
5 关于PWMin和PWMout
对于我的天地飞7通遥控+WFT07接收机来说,遥控发 送给接收机的信号是PPM,而接收机输出的信号是标准的 PWM。
对于接收机来说,我们只需要关心它输出的高电平时 间,也就是PWMin,不用管占空比,因此TIM_Period设定为
0xFFFF。我的WFT07接收机的PWM周期是20ms,高电平是
1ms~2ms。
对于给电调的输入来说,也就是P WMout,要确定其 占 空 比 , 一 般 根 据 自 己 的 电 调 来 确 定 这 个 占 空 比 , 我 用的是好盈天行者20A, 频率为50~432Hz, 所 以我的P WM周 期 设 定 为 2 . 5 m s 频 率 4 0 0 H z , 高 电 平 持 续 时 间 限 制 在0.875ms~2.0ms,高电平一般在周期的20%~80%。
6 如何将遥控的PW Min转化为期望的角度
expect先看一个公式:e(t)=expect – measured,这是PID中的误 差e(t),等于遥控期望值减去传感器的测量值。而将遥控的PWMin转化为期望的角度expect所达到的目 的就是将PWMin转化为expect,使expect的范围大小(不是单 位,PWMin的单位可以看成已经是角度单位了)与measured 的对应起来,并限制expect的范围,对新手来说好操控。




评论