51单片机STC15W408AS驱动无感无刷电机BLDC
看到很多人在用C8051做无感无刷电机的驱动,今天瑞生给大家来个国产51单片机STC15W408AS驱动无刷电机的驱动资料吧!
本文引用地址:http://www.eepw.com.cn/article/201612/341441.htm1.硬件设计
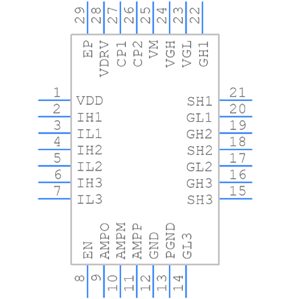
主控单片机使用STC15W408AS,单片机自带硬件PWM模块、ADC模块和比较器模块,所以非常适合做无刷电机的驱动,主频35M,无需外部晶振和复位电路,接好VCC和GND就可以工作。半桥电路使用PMOS+NMOS的组合,PMOS为IRF9540,NMOS为IRF540.驱动芯片用TC4427A。

先在洞洞板上做实验吧。原理图如下所示,懒得用软件画了,还是手画来得快些。下面的图中,只画出了A相的桥,B相和C相的桥与A相一样。

依照原理图,焊接好的板子如下图所示:

2.软件设计
2.1PWM模块
PWM模块用来产生可调占空比,目的是为了给电机施加一定的电压,占空比越大,施加的电压越大,电机转的越快。反之,占空比越小,电机转的越慢。
void PWM_Init(void)
{
PWM0_L=0;
PWM1_L=0;
PWM2_L=0;
CMOD=0X0C; //选择系统时钟/6为时钟源,即频率=35M/6/256=22.8K
CL=0; // PCA计数器清零
CH=0;
PCA_PWM0 = 0X00;
CCAP0H=0; // 初始化占空比为0% H的值装载到L中
CCAP0L=0;
CCAPM0=0x42; // 设置为PWM模式
PCA_PWM1 = 0X00;
CCAP1H=0; // 初始化占空比为0%
CCAP1L=0;
CCAPM1=0x42; // 设置为PWM模式
PCA_PWM2 = 0X00;
CCAP2H=0; // 初始化占空比为0%
CCAP2L=0;
CCAPM2=0x42; // 设置为PWM模式
CR = 1;
}
2.2ADC模块和比较器模块
比较器用来做反电动势的过零检测,选择P5.4引脚为比较器的负输入端,选择ADC通道为比较器的正输入端。
void CMP_Init(void) // 比较器初始化函数
{
CMPCR1=0X8C; // 打开比较器,把P5.4引脚设置为负输入端,ADC通道为正输入端
CMPCR2=50;// 延时消抖时间设置
}
void ADC_Init(void) // ADC模块初始化
{
P1ASF = 0X38; //开通P1.3 P1.4 P1.5端口的模拟输入端
}
2.3六步时序换相
BLDC的六步时序为AB AC BC BA CA CB,下面程序中,分别用0~5表示每一步。
void StepXL(void) // 换相序列函数
{
switch(Step)
{
case 0: // AB
CCAP0H=PWM_Value;CCAP1H=0;CCAP2H=0; // 打开A相的高端
PWM0_L=0;PWM2_L=0;PWM1_L=1; // 打开B相的低端
ADC_CONTR = 0XED; // 选择P1.5作为ADC输入 即c相电压
CMPCR1=0x9c; // 使能下降沿中断
break;
case 1: // AC
CCAP0H=PWM_Value;CCAP1H=0;CCAP2H=0; // 打开A相的高端
PWM0_L=0;PWM1_L=0;PWM2_L=1; // 打开C相的低端
ADC_CONTR = 0XEC; // 选择P1.4作为ADC输入 即B相电压
CMPCR1=0xac; // 使能上升沿中断
break;
case 2: // BC
CCAP0H=0;CCAP2H=0;CCAP1H=PWM_Value; // 打开B相的高端
PWM0_L=0;PWM1_L=0;PWM2_L=1; // 打开C相的低端
ADC_CONTR = 0XEB; // 选择P1.3作为ADC输入 即a相电压
CMPCR1=0x9c;// 使能下降沿中断
break;
case 3: // BA
CCAP0H=0;CCAP2H=0;CCAP1H=PWM_Value; // 打开B相的高端
PWM1_L=0;PWM2_L=0;PWM0_L=1; // 打开A相的低端
ADC_CONTR = 0XED; // 选择P1.5作为ADC输入 即c相电压
CMPCR1=0xac; // 使能上升沿中断
break;
case 4: // CA
CCAP0H=0;CCAP1H=0;CCAP2H=PWM_Value; // 打开C相的高端
PWM1_L=0;PWM2_L=0;PWM0_L=1; // 打开A相的低端
ADC_CONTR = 0XEC; // 选择P1.4作为ADC输入 即B相电压
CMPCR1=0x9c; // 使能下降沿中断
break;
case 5: // CB
CCAP0H=0;CCAP1H=0;CCAP2H=PWM_Value;// 打开C相的高端
PWM0_L=0;PWM2_L=0;PWM1_L=1; // 打开B相的低端
ADC_CONTR = 0XEB; // 选择P1.3作为ADC输入 即a相电压
CMPCR1=0xac; // 使能上升沿中断
break;
default:break;
}
}
2.4电机启动函数
char QiDong(void)
{
unsigned int timer = 300,i;
DISABLE_CMP_INT;
PWM_Value = 26; // 占空比=26/256=10%
Step=0;
StepXL();
delay_ms(100);
while(1)
{
for(i=0;ireturn(1);
if(Step<5)Step++;
else Step=0;
StepXL();
}
}
2.5闭环控制
电机启动以后,需要闭环控制电机的通电时序和速度。这个在比较器的中断函数里面实现。
void CMP_INT(void) interrupt 21 // 比较器中断函数
{
CMPCR1 &=~0X40; // 需软件清除中断标志位
if(Step<5)Step++;
else Step=0;
StepXL();
}
ADC转换结束后,必须软件清除转换标志,再重新开启ADC转换
void ADC_ISR() interrupt 5
{
ADC_CONTR&=0xEF; // 清ADC转换标志
ADC_CONTR|=0X08; // 启动ADC转换
}
2.6通信控制接口
用电脑上的串口调试助手给单片机串口发送“启动”“加速”“减速”“停止”命令。这个功能放到主函数while循环中。
串口初始化函数:
void serial_open(void)
{
SCON = 0X50;//工作在串口模式
AUXR |= 0X04;//
TL2 = 0X71;// 9600 @35MHz
TH2 = 0Xfc;
AUXR|=0X10;
}
主函数:
void main(void)
{
uchar rec=0; // 定义串口接收数据变量
PWM_Init(); // 初始化PWM
ADC_Init(); // 初始化ADC
CMP_Init(); // 初始化比较器
serial_open(); // 打开串口
while (1)
{
if(RI) // 如果串口收到数据
{
rec=SBUF; // 把收到的数据给了rec
RI=0; // 串口接收标志清0
if(rec==0x22)// 加速命令
{
if(PWM_Value<250)
{
PWM_Value++; // 增加占空比
}
}
else if(rec==0x33)// 减速命令
{
if(PWM_Value>10)
{
PWM_Value--; // 减小占空比
}
}
else if(rec==0x11) // 启动命令
{
QiDong(); // 启动
ENABLE_CMP_INT; // 允许比较器中断
EA=1; // 打开全局中断
}
else if(rec==0x44) // 停止命令
{
CCAP0H=0;CCAP1H=0;CCAP2H=0; // 占空比都置0
EA=0; // 关闭全局中断
DISABLE_CMP_INT; // 关闭比较器中断
}
}
}
}
3.总结
上面的软件和硬件,只是实现了简单的控制转动。缺点:1.没有任何的保护程序,比如电流检测、堵转保护等。我在做实验的过程中,烧了2个PMOS、1个NMOS、3个TC4427A.2.比较器过0直接换相,有些提前。电机转动噪音比较大。期待日后改进吧!





评论