基于S7—200PLC的机械手运动控制
工业机械手(以下简称机械手)是近代自动控制领域中出现的一项新技术,并已成为现代制造生产系统中的一个重要组成部分,越来越多地被研究和应用。本设汁的控制系统采用小型可编程控制器S7—200PLC,具有编程简单、修改容易、可靠性高等优点。
1机械手的选择
根据古典力学的观点,物体在三维空间内的静止位置是由三个坐标或围绕三轴旋转的角度来决定的。因此,物体的位置和方向(即关节的角度)能从理论上求得。在实际生产生活中,机械手的自由度不是盲目模仿人手的动作来确定的,而是根据实际需要的动作,设计出最少自由度的机械手来满足作业要求。所以一般专用机械手(不包括握紧动作)通常只具有2~3个自由度。而通用机械手则一般取4~5个自由度。本设计采用的机械手共有5个自由度。
这五个自由度为机械手能够做出手臂伸缩、手臂上下摆动、手臂左右摆动、手腕回转、手指抓紧,该机械手示意图如图1所示。
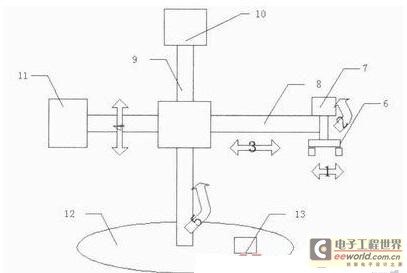
图1 机械手示意图
2动力装置的选择
工业机械手要求精度非常高,所以本设计采用的是步进电机,步进电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数宋控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
不过步进电机需要在驱动器的作用下才能正常工作,所以还要选择驱动器,本设计选择的是价格便宜而又方便使用的中美合资SH系列步进电动机驱动器,主要由电源输入部分、信号输入部分、输出部分等,实物图和接线原理图分别如图2和图3所示。

图2 步进电机驱动模块实物图
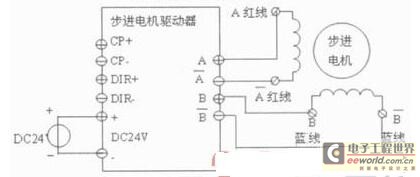
图3 驱动模块与步进电机的接线示意图
电源输入部分:由电源模块提供,用两根导线连接,注意极性。
信号输入部分:信号源由PTO主机提供。由于PTO提供的电平为24V,输入部分的电平为5V,中间加了保护电路。
输出部分:与步进电动机连接,注意相序。
3传感器的使用
采用近位开关作为手爪旋转和底盘旋转眼位检测用;采用限位开关,作为横轴、纵轴限位检测用。
近位开关:有3根连接线(红、蓝、黑),红色接电源正极、黑色接电源负极、蓝色为输出信号,当与挡块接近时输出电平为低电平,否则为高电平。
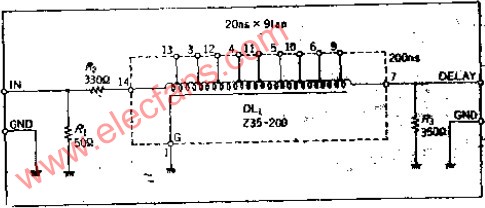
选用型号:ASL-300Q(磁感应式320),其结构原理如图4所示。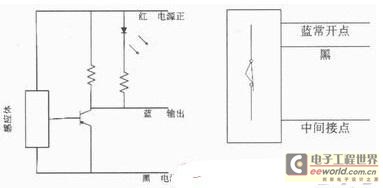
图4 近位开关原理图
限位开关:当挡块碰到限位开关时动作(常开点闭合),选用型号:ASL-300M(机械式310)
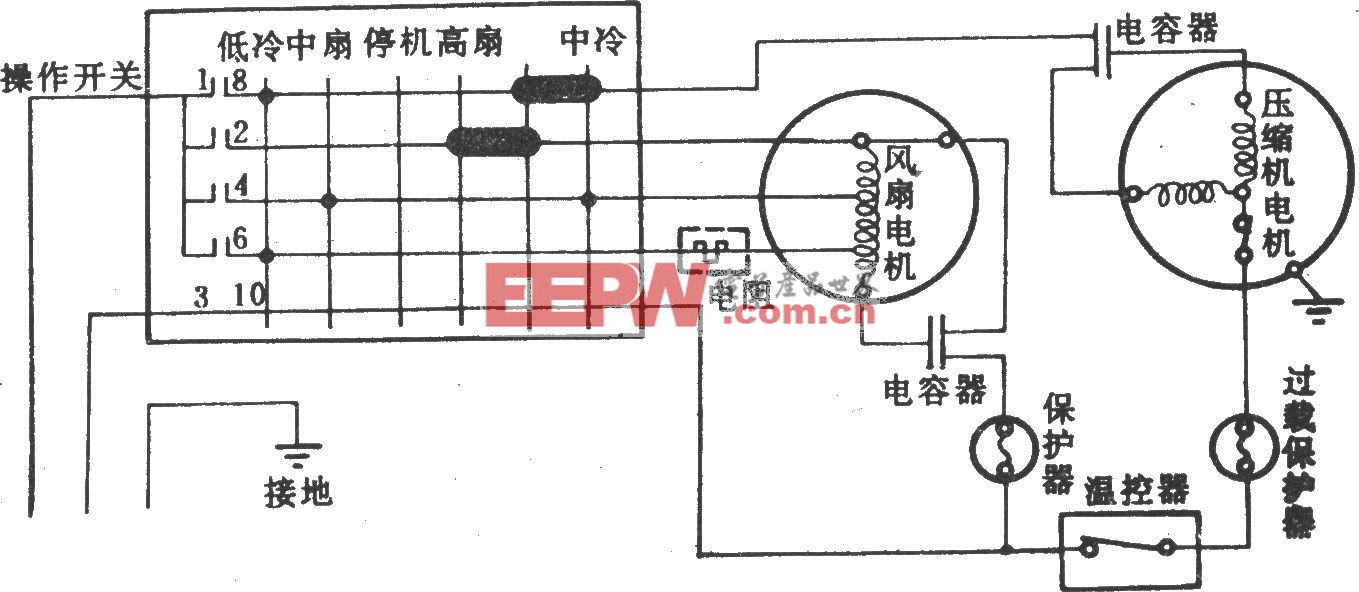
4电气接线图
电气接线图如图5所示。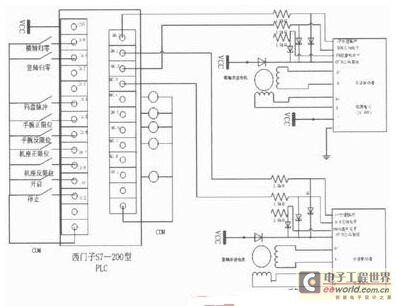
图5 电气接线图
5控制流程设计
本次设计为空间内两点间的物件循环搬运动作。具体控制流程如下:开启PLC,如果机械手不在初试位置上,步进电机开始运转(橫轴向手爪方向移动,竖轴向下移动),机座伺服电机反向旋转到零刻度位置。初始化完成后,首先载入物件所在位置在柱面坐标系下对应的脉冲数,横轴、竖轴步进电机和机座伺服电机同时工作,横轴向前伸,竖轴向上升,机座正转;当步进电机因脉冲输完而中断停止,伺服电机伸到位后,手腕电动机得电带动手腕反向旋转;当传感器检测到限位磁头时,电动机停止,PLC控制电磁阀动作,手爪夹紧,延时一段时间后,然后载入目的地所在位置在柱面坐标系下对应的脉冲数,横轴、竖轴步进电机和机座伺服电机同时工作,返回到物件所在位置;手腕电动机得电带动手腕正向旋转,电磁阀复位,手爪松开延时一段时间;最后判断主程序开关状态,若仍然开启,则开始下一周期的搬运动作。控制流程图见图6所示。
图6 控制流程图







评论