基于PROFIBUS总线的曲轴清理机器人系统设计
电源模块(IC695PSA040):容量40W。该模块可以像I,O一样简单地插在背板上,并且能与任何标准型号RX3i CPU系统工作。
CPU(IC695CPU3 1 0):主控制CPU模块,这个强大的CPU依靠300Mhz的处理器和10Mbytes的用户内存能轻松地完成各种复杂的应用。RX3i支持多种IEC语言和C语言,使得用户编程更加灵活。RX3i广泛的诊断机制和带电插拔能力增加了机器周期运行时间,减少停机时间,用户能存储大量的数据。
离散量I/O模块(IC694MDL645):PAC RX3i直流电压输入模块,24VDC正/负逻辑,16点输入。用于接收外围传感器信号输入。
离散量I/O模块(IC694MDL940):PAC RX3i直流电压输出模块,继电器,N.O.,2A,16点输出。用于驱动外围执行元件。
通信模块(IC695PBM300):PACSystems RX3iProfibus DP Master模块,用于连接外围机器人系统和自动上下料系统。
通信模块(IC695ETM001):PACSystems RX3i以太网接口模块,TCP/IP 10/100Mbits,2个RJ一45端口,内置交换机,用于连接工厂监控系统。
3 通信网络系统
机器人曲轴清理系统采用Profibus—DP作为主通信网络,利用DP接头,分别连接机器人和自动上下料系统,通信结构原理图如图3所示。
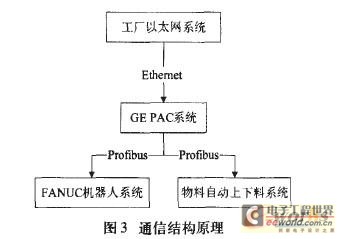
机器人曲轴清理系统是曲轴生产线的一个重要组成部分,通过工业以太网连接进入工厂监控系统。通过以太网网络,工厂管理系统就可以实时地监控机器人曲轴系统的运行情况,包括目前的运行状态、加工工件数量,故障等信息。
GE PAC系统在这个Profibus网络中作为主站,FANUC机器人和自动上下料系统作为从站,根据控制信号的数量,可以配置不同的输入输出信号。
根据系统需要,PAC系统与机器人的通信信号数量配置为8个输入字节和10个输出字节,站地址为3。PAC系统与自动上下料系统的通讯信号数量配置为8个输入字节和8个输出字节,站地址为4。
4 系统的软件设计
系统开发软件采用GE—FANUC自带的ProficyMachine Edition软件,这个软件把PAC开发和触摸屏集成在一起,功能全面。
在采购设备时,机器人系统和自动上下料系统的供应商会提供相应的GSD文件。把供应商提供的GSD文件做为从站添加到DP—Master模块下面,添加完之后如图4所示。

利用专用的Profibus线和DP接头,进行简单的连接,就完成了现场总线硬件连接。再将配置完的软件下载到PAC里。软件主要完成的功能为:
触摸屏上共有9个画面,分别是登陆界面、公司简介、系统布局、系统状态、自动运行、手动运行、检测界面、报警记录、维护呼叫界面。用户可以在画面上设定运行参数,同时监控系统的运行状态。
PAC上的程序用梯形图开发,由6个程序组成,分别是Main主程序,用于整体控制,调用其他子程序。Auto子程序,当系统处于自动运行状态时就调用这个程序,完成自动运行中的过程控制。Manual子程序,当系统处于手动运行状态时就调用这个程序,主要用于调试和设备复位。C—Claas子程序,与自动上下料系统的通信功能在这个程序里完成。Commu—nication子程序,与机器人的交互控制信号在这个程序里完成。Initial子程序,完成系统上电初始化功能。
5 结束语
基于PROFIBUS.DP的通信和可编程自动控制器PAC主从式控制方案已成功应用于曲轴清理机器人系统。该系统已成功地应用于某汽车制造厂的曲轴生产线上。现场运行稳定可靠,并已通过用户验收。



评论