基于PROFIBUS总线的曲轴清理机器人系统设计
引言
在汽车生产过程中,曲轴清理机器人系统是全自动曲轴生产线上的重要组成部分,用于对半成品曲轴进行清理工作。Profibus是一种用于工厂自动化车间级监控和现场设备层数据通信与控制的现场总线技术。并已成为国际化、开放式、不依赖于设备生产商的现场总线标准。
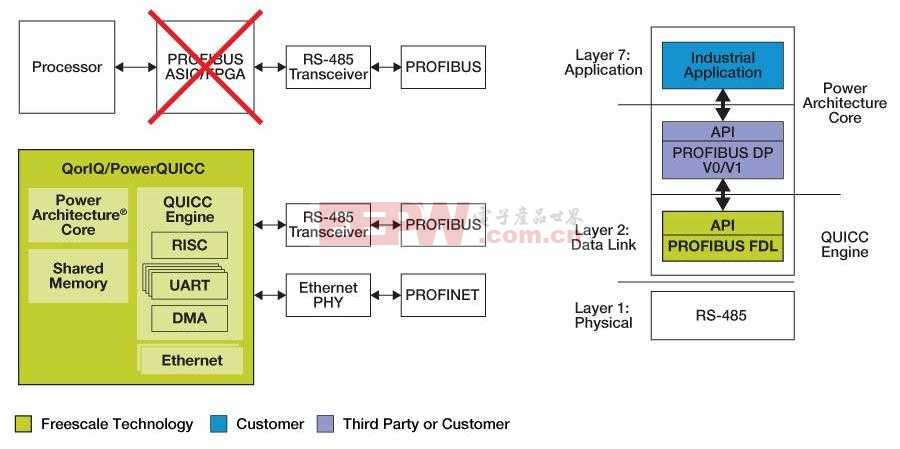
Profibus由Profibus—FMS、Profibus—PA和Profibus—DP组成,其中,Profibus—DP是一种经过优化的高速和廉价的通信连接,专门为自动控制系统与分散的I/O设备之间通信而设计,以数字信号代替了传统的并行信号传输,具有数据传输可靠,响应快,抗干扰能力强,自动诊断及显示故障等优点。
1 曲轴清理机器人系统组成原理
1.1 曲轴清理加工工艺
曲轴清理由3道工序组成:油孔倒角、油孔清理、键槽去毛刺。加工过程采用工件运动,刀具固定的方式进行加工,即机器人抓取待加工的曲轴,运动到对应刀具的位置进行加工,同时整条生产线配有全自动上下料系统。
1.2 系统组成
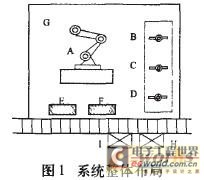
系统整体布局图如图l所示,系统组成为:
A:GE—FANUC R-2000IA型机器人系统,末端负载200kg,用于抓取曲轴进行加工。
B:去毛刺工位,采用高速气动马达,最高转速可达120,000r/min。通过高速运转,将键槽边沿的毛刺去掉。
C:通油孔工位,用于清理曲轴油孔内的铁屑。
D:倒角工位,采用高速马达,用于油孔倒角。
E:上料位,用于曲轴上料。
F:下料位,用于曲轴下料。
G:系统控制柜,控制整套系统的运行。采用GE—FANUC PACSystems RX3i作为主控系统
H:系统控制柜,控制整套系统的运行。采用GE-FANUC PACSystems RX3i作为主控系统,控制机器人,刀具和上下料系统协调正常的运行。
I:机器人控制柜,控制机器人的运行。可以通过示教,对机器人的运动轨迹进行编辑,完成最终的加工工艺。
2 控制系统原理
控制系统采用基于开放的工业标准、具多领域功能、通用的开放平台以及高性能的PAC(ProgrammableAutomation Controller)可编程自动化控制器。PAC的概念定义为:控制引擎的集中,涵盖PLC用户的多种需要,以及制造业厂商对信息的需求。PAC包括PLC的主要功能和扩大的控制能力,以及PC—based控制中基于对象的、开放数据格式和网络连接等功能。
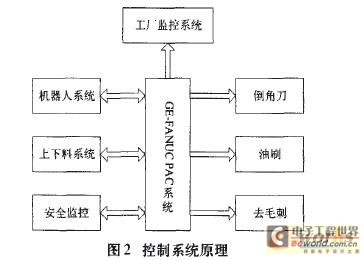
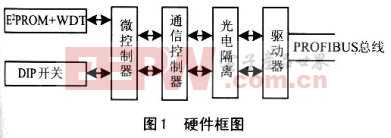
本控制系统采用GE—FANUC PACSystems RX3i作为主控系统,它完全兼容PAC标准。全新的控制器RX3i是PACSYstemS家族的最新成员。同PACSystems家族的其他成员一样,PACSystems拥有一个单一的控制引擎和一个通用的变成环境,它能方便地应用在多种硬件平台上,并且提供真正的集中控制。控制系统原理如图2所示,其硬件组成为:
控制器背板(IC695CHS012):12槽高速控制器背板支持PCI总线和串行总线,为各模块提供安装底座。



评论