基于FPGA的无人机控制器设计与实现
摘要:根据无人机系统的控制特点,提出了一种基于FPGA的无人机控制器设计方案,并完成了该方案的软硬件设计。该方案将键盘扫描、AD采样、指令编码与显示和指令异步串行发送等功能模块集成到FPGA内部,简化了控制器硬件结构。实际应用表明,该无人机控制器具有指令群延时低、功能可扩展性强等优点,能够满足使用要求。
关键词:无人机控制器;FPFG;键盘扫描;UART
无人机的飞行控制和机载电子设备的控制指令主要通过地面控制计算机中的软件或者无人机控制器产生,这两种相互独立的控制方式互为备份。而无人机控制器主要由硬件电路和嵌入式软件设计实现,不依赖于计算机,因此具有可靠性高、稳定性好等优点,是实现无人机远程遥控的主要方式之一。传统的无人机控制器主要由单片机、ARM和8279等芯片设计实现,具有系统结构简单等优点,但是对于无人机控制
系统对指令时延要求和测控系统时序同步等问题,该设计方法增加了测控设备软件的设计复杂度,特别针对滑跑起降型无人机遥控信道低延时数据传输的实际应用要求,传统无人机控制器产生的指令延时难以满足无人机起降控制要求。
采用基于FPGA设计的无人机控制器,充分利用了FPGA并行数据处理能力和同步设计优势,将键盘扫描、指令编码与显示、指令异步串行发送等功能模块都集成在FPGA内部,外围电路仅包含AD采样、电平转换和驱动芯片等简单电路,避免了MCU等单指令周期芯片的时序缺点,系统的硬件结构更为简单,扩展性更强,遥控指令的触发到输出的指令数据群延时小于80 ms,能够满足各种类型无人机的实时远程控制要求。
1 系统硬件设计方案
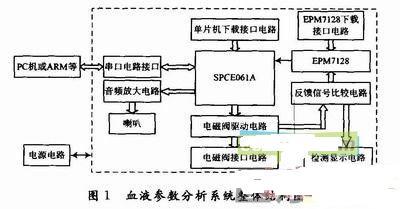
无人机控制器主要由控制键盘、数码显示板和控制器数据处理板组成。控制键盘由8x8开关矩阵键盘和航向控制器构成,主要实现无人机控制器键盘扫描代码和航向模拟量的产生。数码显示板由6个16进制数码管组成,主要实现控制指令代码和航向数据的同步显示。作为无人机遥控控制器的核心部件,控制器数据处理板采用Altera公司的低成本Cyclone4系列FPGA芯片EP4CE10作为指令和数据处理的核心芯片;为降低FPGA硬件资源消耗,AD芯片选用MAXIM公司的串行12Bits AD采样芯片MAX11105,理论航向传感器控制精度可达0.09°;UART电平转换芯片选用MAXIM公司的MAX3387芯片设计实现,具有良好的可扩展性。控制器信号处理板主要实现无人机控制指令的键盘扫描与AD采样、指令编码与显示和遥控指令异步串行发送等功能。系统硬件结构框图如图1所示。
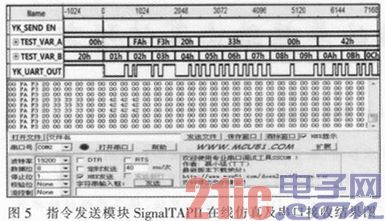
2.3 指令发送模块
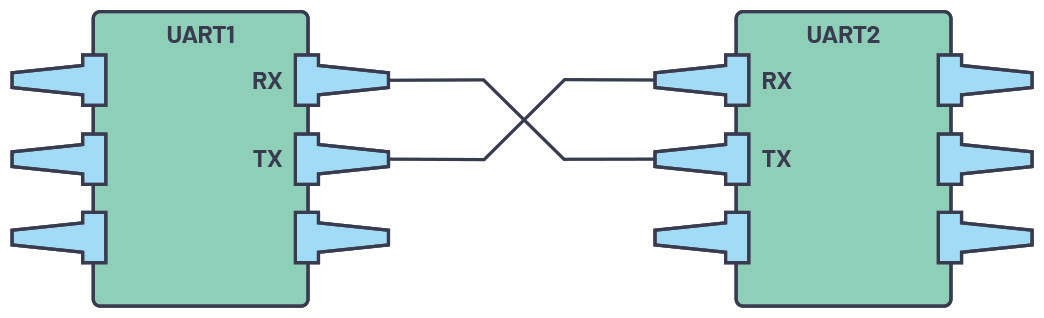
指令发送模块接收到编码后的控制指令和航向控制器数据后,将编码后的指令数据转换为遥控帧数据,并按照异步串行通信协议(UART)将遥控帧数据输出到MAX3387进行电平转换,遥控帧数据串行波特率选取19 200,8位数据位,1位起始位,1位停止位,无奇偶校验位。指令发送模块SignalTapII在线仿真结果及计算机接收到的遥控帧数据结果如图5所示。YK_SEND_EN为数据发送使能信号,Test_Vara为发送的8 bits并行遥控数据,YK_UART_Out为异步串行数据FPGA输出端波形信号。
3 实验应用
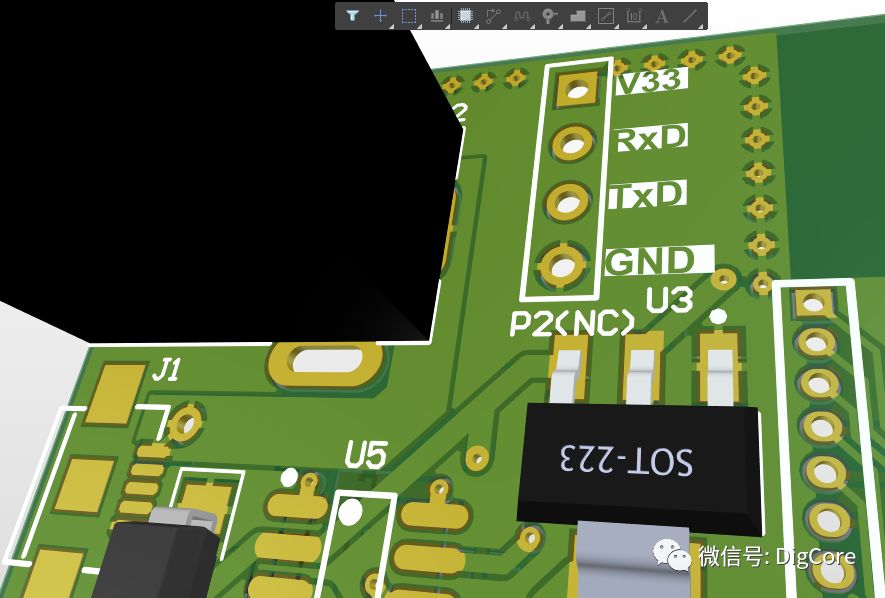
无人机控制器安装于某型无人机地面控制站中。地面站加电后,控制器数据处理板开始工作,每间隔40 ms分别对8x8矩阵键盘和无人机航向控制器进行键盘扫描与AD采样,并实时将采集到数据转换成相应的遥控指令代码,一路驱动数码显示管将指令代码实时显示,一路将指令代码转换成RS232异步串行数据通过测控设备发送至无人机,控制器数据处理板实物如图6所示。实际应用结果表明,采用基于FPGA设计的无人机控制器的各项技术指标满足使用要求,控制指令群时延小于80 ms,设备运行稳定可靠。
4 结论
根据无人机的控制特点,文中提出了一种基于FPGA的无人机控制器设计方案,该方法充分利用FPGA并行处理能力,简化了无人机控制器的硬件结构,降低了遥控指令群延时,解决了测控设备的时序匹配问题,并且具有较好的功能可扩展性,该控制器已经在某型无人机系统中得到成功应用。











评论