基于MSK4226的直流有刷电机四象限控制
摘要:在设计中使用MSP430F169单片机提供控制电机需要的PWM信号,通过电机驱动芯片MSK4226实现直流电机的四象限运行;驱动芯片上的电流测量环节保证电机运动中不发生堵转;最后比较了电机直接启动与四象限控制中的响应速度与达到稳态的时间。
本文引用地址:http://www.eepw.com.cn/article/201610/307523.htm0 引言
本文主要介绍了一种直流电机的四象限控制器。控制器以单片机MSP430F169作为控制核心,利用单片机的PWM功能,可发生多通道占空比可调的PWM信号;PWM信号通过电机驱动芯片MSK4226将电机两端的电压调制成频率一定、宽度可变的脉冲电压序列,控制电机转速与转向;单片机实时监测驱动芯片上的电机电流,发生过流时采取保护;在文章的最后比较了电机四象限控制与单像控制,总结出了四象限控制的优缺点。
1 控制原理及方法
1.1 PWM控制原理
直流电动具有惯性环节,直流电机的数学模型相当于一个电阻和电感串联而成,而冲量相等而形状不同的窄脉_加在具有惯性的环节上时,其效果基本相同。冲量指窄脉_的面积,效果基本相同是指环节的输出响应波形基本相同。
PWM(脉冲宽度调制)控制通过对一系列脉冲的宽度进行调制,来等效地获得所需要的波形(含形状和幅值)。
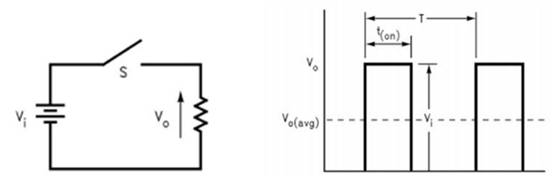
PWM调速是利用PWM调制的方法,将恒定的直流电源电压调制成频率一定、宽度可变的脉冲电压序列,根据冲量相同的原则来改变平均输出电压的大小,以调节电机的转速。
1.2 四象限控制
电机的单象限控制只能运行在电动运转状态下,能量只能单向流动。而电机的四象限控制电机能运行在电动与发电状态下,能量可双向流动。电机的四象限运动分别为正向电动、回馈发电制动、反接制动、反向电动状态。如图1所示,以电机的转速为纵坐标,以转矩为横坐标建立的直角坐标系描述的电机四种运行状态。
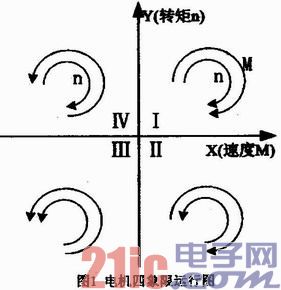
为了实现电机在四象限内运行和切换,采用了双极式PWM变换器。双极式PWM变换器调节占空比来控制能量的流动大小与方向,占空比> 50%,50%或等于50%分别实现I象限、II象限、III和Ⅳ象限电机运动。
2 控制系统
硬件控制系统主要包括核心控制器、电机驱动模块及电机过流保护模块。
2.1 PWM信号的发生
控制系统中,核心控制器采用TI公司生产的MSP430F169单片机,该单片机具有两个16位定时器A和B,利用定时器的捕获、比较功能实现PWM信号发生。
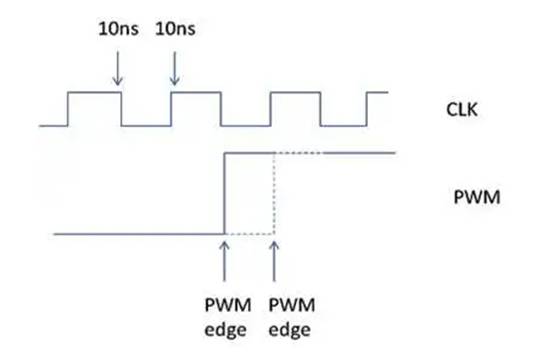
本文中需要两路频率在1~2kHZ之间、占空比可调的PWM信号。首先选择定时器A的时钟为辅助时钟并清除定时器,辅助时钟频率为32.76 8kHz;在定时器的捕获比较寄存器0中调整PWM信号的周期;在获比较寄存器1与2的值可分别调整两路PWM信号的占空比;工作模式设置为PWM复位置位模式;计数器为增计数模式;设置端口P1.2、P1.3为PWM输出端口。
2.2 电机驱动模块
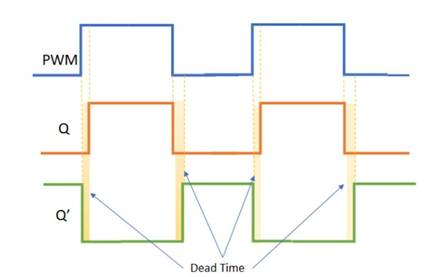
本设计中PWM信号的功率放大主要通过功率模块MSK4226实现。MSK4226内部集成了功率场效应管H桥,H桥自举驱动与控制电路。H桥场效应管具有低的导通电阻(典型值0.013 Ω),最大75V的电源母线电压,20A连续电流,可满足系统功率要求。H桥自举驱动与控制电路包括H桥高低端场效应管驱动、死区时间产生、直通保护及H桥关断等电路。
2.3 控制电路
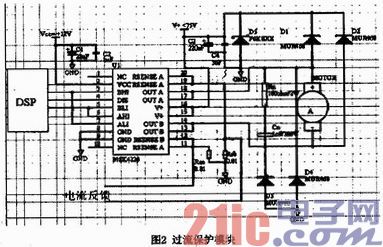
在本系统的双极性PWM模式下,V1、V4开关管控制端AHI与BLI并联,V2、V2开关管控制端ALI和BHI并联;MSP430F169单片机的端口P1.2 P1.3产生的两路PWM信号控制这两个并联端。来自单片机的关断信号接入驱动芯片的关断使能端DIS。功率肖特基二极管D1~D4分别反向并接在V1~V4上,当负载向电源反馈能量时起保护功率管的作用,其反向耐电压应大于电源电压,反向恢复时间10ns左右。电阻R1与电容C1构成缓冲网络,用于抑制尖峰电压。对于某些感性负载,可能导致MSK4226近似100ns数安培的直通现象。反向并接RSENSEA与地之间,RSENSEB与地之间的功率肖特基二极管用于抑制这种现象。
2.4 过流保护模块
如图2所示,在MSK4226的RSENSEA与RSENSEB引脚对地接0.01 Ω无感电阻,电机电流流过电阻,在电阻两端电流取样。取样的电压值经过运算放大器放大后,AD采样后传输给单片机作为判断电机是否堵转的依据。
3 电机四象限控制
3.1 第I象限工作-正转电动运行控制
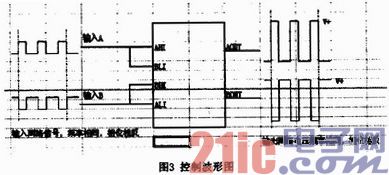
在AHI与BLI、ALI和BHI并联的控制端输入3.3~5V、开关频率小于200kHz的逻辑电平信号,两路信号的频率相同,相位相反。
当AHI与BLI端口输入信号的占空比50%,而ALI和BHI端口信号的占空比>50%时,MSK4226模块的OUTA端口的电压大于OUTB端口,电机正向转动。AHI与BLI端口信号占空比为零,ALI和BHI端口信号占空比为100%时达到正向转动最大速度。如图为AHI与BLI端信号占空比30%,AHI与BLI端信号占空比70%的控制波形图3。
3.2 第II、IV象限工作-电机制动控制
当AHI与BLI、ALI和BHI端口输入信号的占空比都为50%时,OUTA和OUTB端口输出电压占空比为50%,电机处于制动状态,电机停转。制动状态不等于停机,此时电枢两端的瞬时电压和瞬时电流都不为零,而是交变的。控制电机停机可使能驱动模块的DIS引脚。
3.3 第III象限工作-正转电动运行控制
AHI与BLI端口输入信号的占空比>50%,而ALI和BHI端口信号的占空比50%时,MSK4226模块的OUTB端口的电压大于OUTA端口,电机负向转动。AHI与BLI端口信号占空比为100%,ALI和BHI端口信号占空比为零时达到负向转动最大速度。
4 结束语
文章中利用MSK4226模块达到直流电机四象限运动控制。在电机的四象限控制中电机制动时,电机处于高频振动,起着“动力润滑”的作用,消除正反向启动时的静摩擦死区,所以电机启动、运行过程中电流比较连续、启动时间短、响应速度快。












评论