皮带输送机故障显示智能控制器的设计
摘要:皮带运输机在运行过程中,由于负载、皮带自身所受张力的不同,经常会发生打滑、跑偏、过载、撕裂等故障。本文旨在研究这些故障产生的原因,并通过智能控制器显示发生的故障,做到故障定位准确。本系统通过一些传感器对故障进行检测,将信号传入单片机,不同故障编码显示,通过数码管显示可以快速知道故障位置。系统以单片机为核心,通过外部信号和软件设计,大大提高系统稳定性。
本文引用地址:http://www.eepw.com.cn/article/201610/306615.htm皮带运输机是一种摩擦驱动以连续方式运输物料的机械,可以将物料在一定的输送线上,从最初的供料点到最终的卸料点间形成一种物料的输送流程。皮带运输机如今被广
泛的用在码头、煤矿和工业配料等方面,皮带运输机的安全高效运行直接影响着生产的效率。对于多条皮带运输机组成的长距离运输系统,其中一条发生故障如不能及时预报排除,将会对整个生产线造成影响。
1 皮带运输机故障分析
由于海绵垫在生产中需要进行烘干的处理,而刚生产出来的海绵垫由于自身水分过大,不能承受过大的张力,否则会拉断,所以在工业生产中选择皮带作为传动过程的载体。皮带在运行过程中容易发生打滑、过负荷和断带等故障,这些故障都可以通过对皮带速度的检测进行判断。
皮带打滑主要是由于皮带与传动辊之间摩擦减少,一方面可能是皮带没有张紧,另一方面可能皮带老化造成抓地效果差,直接的表现就是皮带速度低于设定的速度。
过负荷故障产生的原因主要是皮带张的太紧或者运输的物品超过了额定承载量。该故障可能导致皮带传动驱动器报警而停止运转,直接的表现就是速度小于设定值。其监控的方式可以通过监控驱动器的电流判断。
断带产生的原因可能是皮带老化,或者联轴器机械故障断开。当故障发生时,皮带速度会急剧下降,瞬间可停止运行。
2 皮带故障如何检测
2.1 皮带打滑
皮带打滑时直接影响就是主传动速度与设定速度不一致,假设主转动速度为Vp,设定速度为Vs,打滑时速度偏差在一定范围内我们忽略影响,假设极限为10%就需要进行检
修,那么故障判断为
,在此过程中,在皮带上设置一根被动辊,用接近开关探测被动辊单位时间里旋转的圈数,乘上被动辊的周长就可以算出皮带的运行速度了。接近开关的安装如图1所示。
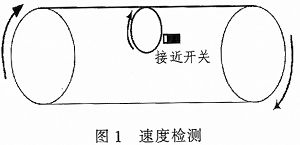
假设T秒内测得的接近开关脉冲数为n,被动辊的周长为C,那么
,Vs可以根据设定给驱动器的电压得到,假设电压为E,电压与速度系数为K,那么Vs=K*E,这样就可以通过这些参数判断皮带是否打滑了。
2.2 皮带跑偏
跑偏的检测采用对射光电管,安装方式如图2所示。
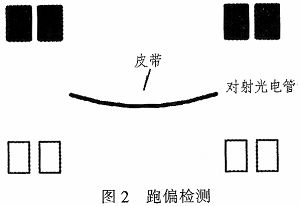
通过检测对射光电管的开断可以判断皮带是否跑偏,并触发报警系统进行声光报警,防止出现严重机器故障。内侧为一级跑偏检测,外侧为二级跑偏检测。
2.3 过负荷检测
在工业生产中,为了更好的满足生产需求,一般采用变频器驱动电机进行调速,当负载增加时,变频器的电流也会增加。我们通过设置变频器的电流来保护电机,使其工作在安全状态下。当电机电流超出设定的电流门限时,输出报警,并驱动外部声光报警器。
2.4 皮带断裂和联轴器脱辊检测
当皮带或者联轴器脱辊时,第一影响的就是皮带的速度,检测皮带的速度迅速下降,几秒内可能就变为0。在这些故障的检测中,最多关注的就是皮带速度的检测,通过一些故障对速度的影响,运用反推的方法,基本可以实现故障的全监控。
3 智能控制器硬件电路设计
本系统以单片机STC90C516为核心,外围主要由接近开关、对射光电管、变频器、LED显示器、D/A转换模块PCF8951T和一些辅助电路组成。下图3给出了硬件的原理图。
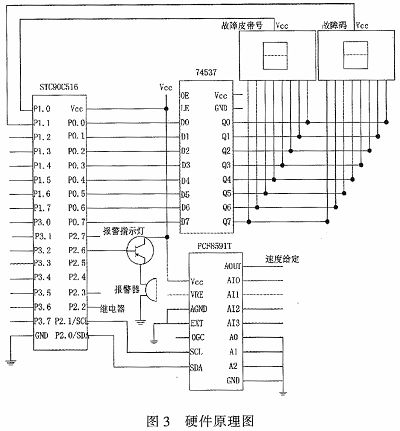
通过将外部的电机启动信号输入P1.2口,停止信号接P1.3口,P2.2口接启动继电器,实现当检测到P1.2按键被按下时,继电器吸合,电机启动;当检测到P1.3口按键被按下时,继电器断开,电机停止运转。系统采用2个8段码LED显示,一个显示故障皮带的皮带号码,另一个显示故障代码。
预设故障代码为:0—正常;1—打滑;2—断裂或联轴器未连接;3—皮带跑偏。如果有故障发生,P2.6将驱动蜂鸣器进行报警,同时P2.7将使指示灯闪烁达到声光报警的效果。系统采用PCF8951T的A/D转换芯片,直接通过SCL、SDC的I2C总线,将AOUT的输出模拟量作为传动辊的速度信号,并通过P1.5和P1.6实现加减速。
将被动辊的速度探头检测信号接入P1.4,通过对单位时间内测得的脉冲数,得到皮带运行的速度,与给定的速度信号进行对比,可以分析皮带是否正常运行。一根皮带采用4对对射光电管,分两组对皮带是否跑偏进行检测,一级跑偏时进行预警,二级跑偏时将停止皮带的输送,以防止不必要的财产损失。
4 软件设计
本系统采用C语言进行编程,由主程序和各个子程序组成。智能控制器的程序流程图如图4所示。
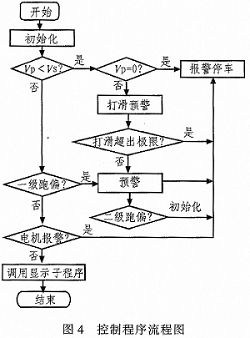
程序初始化后,依次检查皮带是否打滑、跑偏、电机是否过载报警等故障,并根据故障的等级进行相应的处理。LED显示故障代码采用调用子程序的方式。编程软件采用Keil进行设计,并对相应的程序进行模块化处理。
5 结束语
主要针对现今国内主流的海绵生产线容易发生的故障进行分析研究,设计了集报警、显示、操作于一体的自动化系统。该系统主要以单片机为核心,充分利用了单片机集成度高、功能强、体积小、功耗低和可靠性高等特点。在试验中,误差较小,基本可以满足使用的要求。













评论