DSP和ARM的音圈电机伺服控制系统设计
2.3.1 DSP主程序
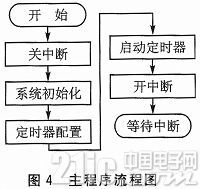
DSP主程序主要完成系统的初始化、定时器中断配置、启动定时器、等待定时器中断。系统初始化包括时钟初始化、外设初始化、中断服务程序初始化等。当定时器中断产生时,程序转向执行中断,完成位置控制算法。定时器时间即位置控制算法的调节周期,根据实时位置的采样周期来确定。定时器时间若设置过短,频繁的调节会造成系统的不稳定;若过长,则无法达到好的调节效果,本实验中定时器时间选择为采样周期的4倍。主程序流程图如图4所示。
2.3.2 定时器T0中断程序
定时器T0中断程序主要完成位置环的计算。根据课题中音圈电机系统的特点,位置环采用积分分离式比例和积分(PI)控制算法,为减小累计误差对系统的影响,采用增量式PI控制。
位置调节器的输出可表示为:
△Pn=Pn-Pn-1=KP(en-en-1)+βKIen
其中KP、KI分别为位置调节器的比例、积分系数;en为第n次采样的偏差;
为积分项的开关系数,ε为根据实际情况设定的积分分离阈值。
当电机的实际位置与给定期望位置的误差小于一定值时,再恢复积分校正环节,以便消除系统的稳态误差,保证伺服电机位置控制的精度。
3 实验结果
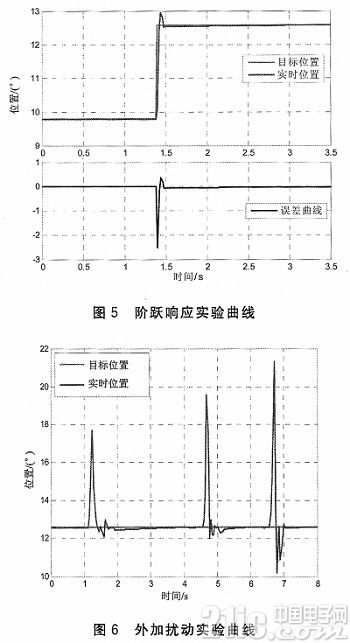
DSP+ARM双核控制器硬件电路经过测试可用,并在控制器上实现了相关控制算法,验证了算法的可行性,系统响应速度快,稳态精度高。据统计,稳态精度能达到30 s。图5为阶跃响应实验曲线。图6表明,系统受到外界干扰后能迅速恢复到原平衡位置,抗干扰能力强。
结语
本文提出了一种基于浮点DSP和ARM的音圈电机驱动控制器,完成了用于激光定位和扫描的音圈电机位置伺服控制。实验结果表明,系统具有较好的稳、动态性能以及抗干扰能力,可以满足系统的要求。通过功能的合理划分,实现了资源的合理配置;ARM的运用,大大简化了硬件设计,分担了DSP的计算任务,保证了控制系统的实时性。












评论