基于ARM的分布式干扰机控制单元设计
目前常见的干扰机一般都采用上位机作为控制单元,优点是接口和整个单元开发均较为方便,但缺点是无法脱离计算机独立工作。本文采用ARM及大尺寸触摸屏作为平台开发的分布式干扰机控制单元,ARM与干扰机可集成为一体,具有携带方便、稳定性高、成本低、功耗小、可移植性好等优点。
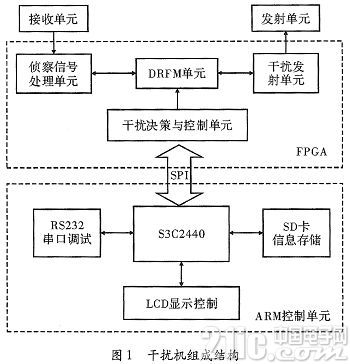
本文引用地址:http://www.eepw.com.cn/article/201609/303796.htm设计的分布式干扰机由两套干扰机构成,实现对雷达的分布式协同相干和非相干干扰。两套干扰机在软硬件上均采用相同的设计,其组成结构如图1所示。
1 系统硬件设计
1.1 硬件平台的选择
如图1中,ARM控制单元所用平台为友善之臂公司推出的Miero2440开发板,特点如下:
(1)采用Samsung S3C2440为微处理器,主频400 MHz,并采用专业稳定的CPU内核电源芯片和复位芯片来保证系统运行时的稳定性。
(2)支持Thumb/ARM双指令集,能很好地兼容8位/16位器件,大量使用寄存器,寻址方式灵活简单、指令执行速度更快、效率更高。
(3)是第一款统一采用支持EABI标准交叉编译器的开发板(EABI是ARM结构下的一个编译规范和标准,而只有符合EABI标准的编译工具编译出来的目标文件才是互相融合的,这对于后期开发程序进行交叉编译以及移植尤为重要),而其他同类开发板仍在使用拼凑的各个版本的编译器,会导致开发效率不高,可移植性不好。
(4)拥有4个通过USB HUB芯片扩展的USBHost以及1个USB Slave。其中4个USB Host接口和普通PC的USB接口相同,可以接常见的USB外设,这对于开发过程中需要暂时外接键盘鼠标进行系统测试提供了便利;而USB Slave的主要作用是下载Linux内核至开发板中,以及系统一但崩溃可通过其进行快速恢复。
综上所述,Micro2440是一款实用的ARM9开发板,系统稳定性好、主频高、运行速度快,可减少软件开发时间,外围设备资源丰富,从而降低系统的复杂度、减少系统成本。所以最终选择Micro2440作为系统的硬件平台。
1.2 SPI驱动的开发
设备驱动是操作系统的一部分,一般情况下操作系统并未给各种类型的硬件提供设备驱动程序,而操作系统在无设备驱动的支持下无法正常控制硬件。所以要结合系统具体的硬件情况开发设备驱动。
Micro2440的SPI接口可以进行串行数据传输,它包含SPIO和SPI1两个SPI接口,每个接口分别有两个8位数据移位器用于数据的接收和发送,数据同时进行发送和接收。SPI驱动的添加通过编译内核实现,它与内核一同启动。SPI驱动在被加载时,先调用init_module(),该入口点函数用来初始化设备驱动程序,其一个重要功能是往内核中注册此设备,完成注册则需要调用register_chrdev()。
该设备成功注册后,会得到自定义的次设备号以及系统为之分配好的主设备号,其中,主设备号用来反映设备类型,次设备号则用于区分同类型的设备,同时和文件系统建立联系。嵌入式设备驱动程序在卸载时,要回收系统相应资源,这里调用unregister_chrdev()来复位设备的相应寄存器,同时从内核中注销此设备。而系统调用就是对相应设备进行操作,如调用open、read、write以及ioctl等,以供用户应用程序使用。图2描述了嵌入式设备SPI驱动程序在内核中的注册、卸载与系统调用的全过程。

一般SPI驱动可分为:设备的注册与注销、打开与释放、读写、控制以及中断和轮询处理等一系列操作。基本的SPI驱动主要操作是一个内核数据结构file_operations,通过该结构为文件系统提供入口点函数,即访问设备驱动程序的函数,该结构在
1.3 RS232接口设计
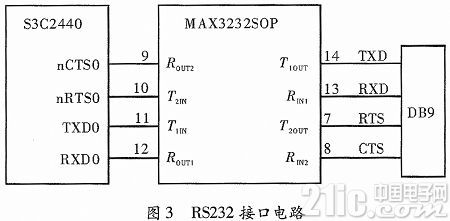
S3C2440集成了3个串口UART0、1、2,文中用到的是UART0。UART0作为标准串口通信,与主机相连用于系统调试、超级终端控制和文件收发。图3为S3C2440与RS232信号连接图,其中MAX3232SOP作为串口UART0使用。
1.4 SD卡接口电路设计
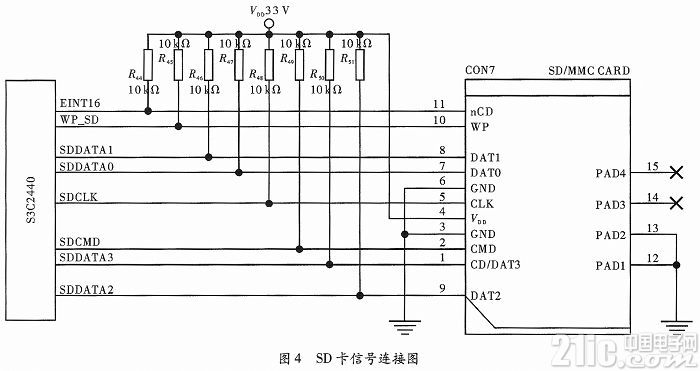
SD卡有两种总线模式,即SD模式和SPI模式。SD模式采用4根数据线传输数据,数据传输快,但协议相对复杂。SPI模式采用1根数据线传输数据,传输速度相对较慢,但传输协议与操作简单。系统采用SD模式进行数据传输。SD模式下,SD卡的9个引脚分别是命令、时钟、3个电源以及4个数据输入输出引脚。SD卡通过卡座与主控制器相连,由于S3C24 40提供了专用的多媒体卡接口,简化了SD卡与S3C2440的硬件连接。具体的信号连接图如图4所示。
2 Qt界面设计
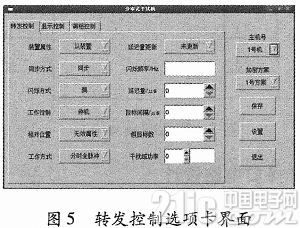
在Qt3.3.8版本下,根据分布式干扰机的功能需求,以及ARM开发板触摸屏的尺寸综合进行设计。考虑到显示屏大小的限制,以及各功能模块的区分,设计了转发控制、显示控制和调相控制3个选项卡,每个选项卡中的编辑项与显示项相互独立。其中转发控制选项卡中主要是ARM控制系统对分布式干扰机的配置参数,如图5所示。显示控制则主要用于显示干扰机测量或计算出的内容,调相控制是对多个假目标角度的配置,这里只截取了转发控制选项卡的界面截图。而对于加密方案配置项,一直需要显示的主机号项,以及随时可能操作的设置及退出按钮,独立于3个选项卡之外,会始终显示在界面上。









评论