详解基于CAN总线的汽车仪表系统设计―核心电路模块
电源电压调整电路设计
本文引用地址:http://www.eepw.com.cn/article/201609/303520.htm电源的选择是关系到系统稳定运行的重要因素之-,也是该仪表能成功应用的重要-步。汽车停止和启动时的电源来源于汽车上的蓄电池,而汽车蓄电池是+24v(轿车为12v电系,卡车和重型货车为24v电系),启动运行时发电机与蓄电池采用并联的方式对电器件供电,电压波动范围为16V-32V。在仪表内部电路中,液晶屏背光,蜂鸣器,各功能指示灯(发光二极管)为12V,MCU(H128)单片机的芯片内部使用3v电压、刀0端口和外部供电电压为 sv,EZPRoM等其他电气元件为SV,所以可靠的电源转换也是本仪表能成功应用的关键技术。由于汽车工作时负载变化大,电压波动范围大,而本系统所用器件大多是SV和+12V供电的,其驱动电流都比较小,以及AD转换参考电压都需要较稳定的电压。
本系统选择的电压模块首先要进行电平转换,把+24V转换成12v和SV,同时保证其输入电压范围大,输出电压稳定。本系统选用的是NS的开关电源稳压转换器LM2574-5。开关电源以小型、轻量和高效率的特点被广泛应用于以电子计算机为主导的各种终端设备、通信设备等几乎所有的电子设备,是当今电子信息产业飞速发展不可缺少的-种电源方式。LM2574系列其可以驱动0.5A的负载;输入电压范围大,在6V-40V之间;只需要4个简单的外围调整器件,即可把 +24V调整到+5V给元器件提供稳定的电压。而其他12V供电的元器件可直接采用电阻进行分压后获取所需电压。
选用开关电源LM2574-5,由反馈电路控制输出电压。其最大电流输出为0.5A,从24V电源转换为SV时转换效率达到80%。仪表核心控制电源部分采用了芯片7805做二级稳压,仪表的核心电源电路分别如图4-8所示。
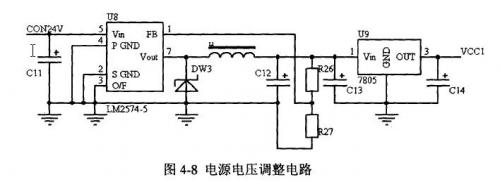
仪表从车载蓄电池获取24V电源,经过电容Cn滤波进入开关电源芯片LM2574-5,输出端接稳压二极管DW3和滤波电感Ll,滤波电容C12。该开关电源从输出取样作为反馈,R26,R27组成分压电路,为芯片反馈引脚提供参考电压。由R26,R27的阻值分别为5.IK,1.2K,决定二次稳压前电源电压为6.5V。在该电路中,仪表的输出电压可用以下关系式计算:

二次稳压电源7805的输入、输出端分别接滤波电容C13,C14,经过二次稳压后输出VCCI为sv的标准电压。输出电容C14并兼顾储能缓冲作用,C13为-个1000uF的电解电容,以便掉电时可以及时地保存数据。本仪表内部包含如图4-8所示的电源模块两个,为液晶屏背光模块使用的12V- 个,其结构和图4-8相比省略了二次稳压,通过更换R26,R27的阻值分别为9.IK,IK,使输出电压为VCCZ(12V)。
CAN总线接口模块设计
每个CAN节点在物理层上都需要通过-个收发器芯片连接到CAN总线上。收发器可以提供CAN所需要的大电流驱动,并可以提供电流保护,避免受到出错CAN节点的影响。
本系统CAN总线驱动器选用的是PHILIPS公司的TJA1040,它采用了先进的绝缘硅(silieon-on-insulator),是用以代替82C250的高速CAN总线驱动器[461。该器件提供了CAN控制器与物理总线之间的接口以及对 CAN总线的差分驱动发送和接收功能。TJA1040除了具有82C250的主要特性外,还在某些方面作了很大的改善,主要特性如下:
与ison898标准(高速CAN总线标准)完全兼容;
速率高(最高可达IMbps);
总线与电源及地之间的短路保护;
待机模式下,关闭发送器,电流消耗非常低(最大15以);
优化了输出信号CANH和CANL之间的祸合,大大改进了信号的电磁辐射(EME)和电磁干扰(EMI)的性能;
具有强电磁干扰下,宽共模范围的差动接收能力;
对于TXD端的显性位,具有超时检测能力;
输入电平与3.3V完全兼容;
与CAN通信控制器之间无需再加光电祸合器进行隔离;
SPUT引脚代替Vref弓I脚,能有效的改进总线DC电源的稳定性。
TJA1040与H128之间的电路连接如图4-9:
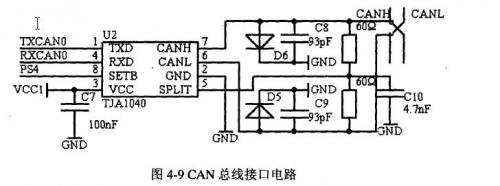
图中CANH和CANL代表CAN物理总线厂IXCANO、RXCANO和PS4分别对应H128上的引脚。CANH和CANL与地之间分别连接了两个 93pF的小电容Cg、Cg和两个防雷击稳压二极管DS、D6。CS和Cg可以滤除总线上的高频干扰信号,有-定的防电磁辐射的能力。汽车电器设备工作环境恶劣,稳压二极管可以抵抗两输入端出现的瞬变干扰,保护电子设备的正常运行。特别是雷击浪涌波,其持续时间短,脉冲幅值高,能量大,给电子电器设备的正常运行带来极大的危害。
脉冲信号处理电路
车速传感器有霍尔型非接触式传感器、磁电式传感器、光电式传感器等,其工作原理都是在车辆行驶的过程中连续向外发送脉冲信号来传递相关的信息。光电式传感器的工作原理是由常规车速表软轴驱动,软轴带动开有方孔(4,6,8,12等)的轮子在发光二极管和光敏二极管之间旋转。由于轮子轮番遮断放光二极管发射的光束,光电晶体管变发出-连串的电脉冲信号,经过信号采集测量模块将其整形成平滑的脉冲信号,如此传感器便能随着车轮的转动而输出相应频率的连续脉冲信号,然后被H128控制器计数成每秒脉冲数,每秒脉冲数变换成公里/小时值。
转速不仅仅是发动机的-个简单的工作参数,而且是计算电子控制系统其它参数的依据和控制喷射正时的基准。转速信号是通过转速传感器测量而得的,如果传感器不能稳定地工作,电控系统也就无法正确地控制发动机正常工作。所以,传感器的性能直接关系到电控系统的性能。发动机转速表分为汽油机和柴油机两种,前者的传感信号取自点火系统初级电路的脉冲电压,后者的传感信号则来自安装在飞轮上的传感器。这里我们选取后-种方式,采用磁电式曲轴转角传感器,由转子和线圈组成。转子固定在分电器轴上,线圈固定在分电器壳体上。永久磁铁的磁力线经转子、线圈、托架构成封闭回路。转子旋转时,由于转子凸起与托架间的磁隙不断发生变化,通过线圈的磁通也不断变化,线圈中便产生感应电压,并以交流形式输出。发动机转动时,使感应线圈内磁通变化,从而在感应线圈里产生交变的电动势,传感器相应的处理单元再将它处理后,即变成脉冲信号。由于车速〔或发动机转速〕传感器输出的信号不是标准方波信号,而且往往还附加了许多的干扰信号,这就要对信号进行预处理,去除其中的干扰信号,并把信号整形为标准的方波信号输入给MCU。其处理电路及与H128连接的电路图如图4-10:




评论