基于开关电源芯片MC33167的LED驱动器开发
电流源电路如图3所示,通过外部叠加电压Uc来控制输出电流。由叠加原理可知:
![]()
IL为负载电流,若取R4=R5,R6=R7,Uref=5 V,单片机输出的控制电压Uc为0~5 V,偏置电压Up为5 V。当Uc=0时,IL=0;当Uc=5 V时,IL=1 A,采样电阻Rc=0.25 Ω,可得:IL=0.2Uc。因此通过调整控制Uc的大小,可以线性控制输出电流的值。
4.2 LED驱动器的闭环稳定性分析
由上述可知驱动器控制系统各部分的传递函数,当PWM输出接LC滤波器时,可以得到其总体控制结构如图4所示。
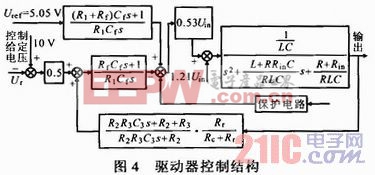
综合考虑LED驱动器的用途,在设计时控制系统首要考虑系统稳定性和控制精度,同时驱动器主要用于汽车,外界干扰比较大,而且调光速度不会很快,因此系统带宽不需要很大。取滤波电感200μH,电容20μF,此时滤波器谐振频率ωn=15.8 krad·s-1,驱动器开关频率ω=452 krad·s-1,所以输出纹波衰减约818倍,完全满足滤波要求;实测电感电阻及电源芯片内阻之和Rin=0.1Ω,负载电阻10Ω,阻尼系数ξ=0.4 73,此处选择较小的ξ也有利于滤除纹波;电流采样电阻0.1 Ω,滞后校正电路中R2=100 Ω,R3=10 kΩ,C3=1μF,两个转折频率ω1=100 rad ·s-1,ω2=10 krad·s-1,因此有效地降低系统高频增益,并且消除了ξ对系统稳定性的影响;同时驱动器PI控制器中Rf=2 000Ω,Cf=1μF,其零点转折频率ω0=500 rad·s-1,处于滞后校正极点转折频率ω1=100 rad·s-1与系统剪切频率ωc=1150 rad·s-1之间,因此使整个系统幅频特性以-20 dB/dec穿过0 dB线.提高了系统的稳定性。
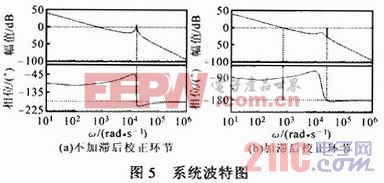
滤波器内阻Rin=0.1 Ω时,负载电阻R=10 Ω,L=190μH,C=20μF时系统开环波特图如图5所示,其中图5a为系统不带滞后校正环节时的波特图,图5b为滞后校正后的波特图。由图可知,经过滞后校正系统变稳定,且相角裕度比较大。
4.3 LED驱动器电路设计
驱动电流源电路以开关电源芯片MC33167为核心,其工作原理图如图6所示。
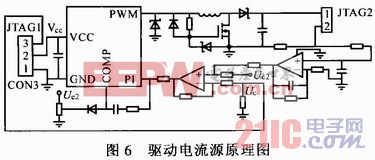
首先考虑电压源,通过电压源的实验电路充分了解电源的工作原理。然后设计得出电压源,通过电压源的实验电路充分了解电源的工作原理。然后设计外部电流反馈环及外部电流控制电路。由于单片机的输出电压范围为0~5 V,因此控制电路还应包括控制电压与单片机输出电压的匹配电路。驱动器智能控制模块电路以单片机PIC18F258为核心,它采用16位高性能RISC CPU,具有1536字节RAM,32 k FLASH,片内含有A/D,EEPROM存储器,具有PWM输出功能,并集成了硬件实现的USART和CAN串行接口。单片机控制模块电路其外围配置有电源、复位、晶振,以及基于PWM信号的电压输出、485-Can通信接口收发器等电路。







评论