基于计算机图像序列的人体步态参数获取方法
人体步态分析在临床诊断、物理治疗和体育训练等领域有重要意义。通过步态分析可以获得人体下肢的运动信息,从而为病人的康复治疗及运动员的优化训练提供依据。
本文引用地址:http://www.eepw.com.cn/article/199246.htm现有的基于图像序列的步态分析方法常将人体视为一连接型物体(Articulated object,就是以某种连接方式连接在一起的多个刚性部分组成的物体),并借助于图像序列分析的方法获取运动参数。Rashid的方法是将一些小亮斑置于人体的各关节,在摄像机获得人体运动的图像序列后可由这些小亮斑的位置得到人体运动的骨架型模型,然后通过这种模型跟踪人体的运动。Chen的模型采用了14个连接点和17个刚性连接部分,并对人体的运动施加了一些约束,如:双腿或双手不能同时向前或向后运动等。因为某些未康复病人的运动往往不全满足这些约束,所以Chen的方法对于获取未康复病人的运动参数存在明显的缺陷。Baumberg利用周期B样条逼近图像序列的人体轮廓,并通过对若干图像序列的训练自动获得2D的轮廓模型。
以上的分析方法都建立在复杂的数学模型之上,计算的负担较重,有的方法甚至要花很长的时间才能得到运动参数的估计值。另外,以上的一些分析方法除考虑步态的分析参数外,还涉及了诸如手势等人体其它部分的分析参数,这对于步态分析而言,自然是浪费了许多不必要的时间。现有的这些方法的执行速度,严重影响了它们的实际应用。
针对现有分析方法所存在的缺陷,本文将利用时空XYT中的XT切片上的数据实时地重建出运动轨迹,并由此反映出人体的步态情况。在运动轨迹的重建中,本文利用基于常加速度模型的Kalman滤波,并利用模糊综合评判的方式进行轨迹关联,使得两腿在交叉时刻附近的运动轨迹能得到正确的延续。

1 本文方法的实现过程
图1(a)为一人体运动图像序列,图1(b)为图像序列的时空XYT的某一切片XT,它显示了两条腿所留下的印迹。这些印迹包含着人体运动的步态信息,如何利用XT上的印迹获取步态参数是十分重要的。本文的方法是利用Kalman滤波建立XT上的两下肢轮廓点的运动轨迹(共四条轨迹),同时得到每一时刻运动轨迹的速度及加速度信息。轮廓点的遮挡问题可以通过Kalman滤波对轮廓点的预测得到解决。
1。1 轨迹跟踪
在一维跟踪中,可定义状态向量为:

其中,x(t)为位置坐标;v(t)和a(t)分别代表速度和加速度。由状态向量可得状态方程为
![]()
其中
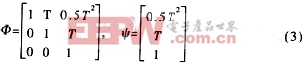
T为图像帧间的时间间隔;n(k)为零均值白噪声序列。对所有的k和j,
由状态向量可得到观测方程为
![]()
其中H=[1,0,0];η一维零均值噪声,方差为。
根据文献,和的值可根据图像序列的实际情况加以确定。
由于状态方程和观测方程都是线性的,所以我们可以用标准的卡尔曼滤波器分别对四条轨迹进行预测跟踪。有关卡尔曼滤波的具体内容请参阅文献,这里不再赘述。
1。2 用模糊综合评判进行轨迹关联
在轨迹的关联中,我们用模糊集理论对预测点与实际点之间的距离、三帧图像的方向函数及速度函数进行综合评判。取评判因子为λ1、λ2和λ3。距离的隶属度函数的取法如下:
![]()
(5)式中MAX(d)是指整个图像序列中的距离的最大值。为轨迹i在t+1帧图像中的预测位置,为t+1帧图像中点j的位置。方向的隶属度函数的取法如下:
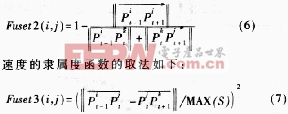
其中,MAX(S)指整个图像序列的最大速度函数值。模糊评判按下式进行:
![]()
对于轨迹i,我们将第t+1时刻的每一轮廓点代入(5)式,并计算出最小的M(i,j)。这样,我们就可以将点j归入轨迹i之中。如果特征点j同时使下面二式成立:
![]()
上两式中s代表t+1时刻的任一轮廓点。在这种情况下,我们就要比较M(i,j)和M(k,j)的大小,当M(i,j)<M(k,j)时,我们将轮廓点j归入轨迹i,而将另一点g归入轨迹k,g满足下式:
![]()
在处理第一和第二时刻的轮廓点时,(5)式用下式代替。
![]()

当轮廓点出现遮挡现象时,我们可以将预测位置作为实际特征点的位置,从而使轨迹得以延续。由于前三时刻图像对于轮廓点的跟踪起着重要的作用,所以我们假设在前三时刻无遮挡现象发生。
2 实验分析
一单目动态图像序列的实验情况如图2所示,图像为256×256黑白点阵图像。图2(a)中列出了该序列的第1、第8、第15和第22帧图像。在图像的Y=225处获得XT切片。图2(b)显示了XT切片上的两下肢的轮廓点,当(2)式中n(k)的方差取0.015,(4)式中η(k)的方差取0.05。评判因子为λ1、λ2和λ3取0.5、0.25、0.25,则可得到图2(c)所示的轨迹重建结果。在下肢交叉运动时,某些轮廓点可能被遮挡,用Kalman滤波的预测位置代替遮挡点的位置,使图2(c)的轨迹得到了很好的延续。
通过轮廓点轨迹的建立,就可以从Kalman滤波中获得轨迹在每一时刻的速度和加速度等信息,而这些信息完全反映了人体的步态情况。由于这一过程计算简单,计算机的计算负担很轻,所以具有较高的完成速率。
本文摒弃了人体图像序列分析的复杂数学模型,从图像学的某一XT切片入手,从XT切片上离散的轮廓点重建出运动轨迹。轨迹的重建通过Kalman滤波的方法,使得轮廓点的遮挡问题能通过预测向量的方法得到解决。同时通过Kaman滤波,得到了每一时刻轮廓点运动的速度及加速度等信息,也就是获得了步态参数。由于本文方法具有较高的完成速率,所以更具实用价值。
更多医疗电子信息请关注:21ic医疗电子












评论