基于MC9S12XSl28微控制器的智能车硬件设计
摘要:以“飞思卡尔”杯智能车大赛为研究背景,采用MC9S12XSl28作为核心处理器,通过对比各个模块不同设计方案的性能,完成智能车电源、驱动、图像采集、测速等模块的设计与实现。通过大量的实验调试完成了智能车的组装与机械部分调整,使得智能车结构更为合理。实验及实际比赛表现表明,该智能车硬件结构稳定,性能良好。
关键词:电源设计;电机驱动;图像采集;二值化电路;MC9S12XSl28
随着汽车电子业的迅猛发展,智能车作为电子计算机等最新科技成果与现代汽车工业相结合的产物,因其具有的智能特点而成为研究重点。“飞思卡尔”杯全国大学生智能汽车比赛在此背景下产生,竞赛规则规定。赛车在设定的赛道上能够自主行驶,并以最短的时间跑完全程者获胜。因此,智能车硬件不断创新以适应小车的速度要求。本文以MC9S12XSl28为核心处理器,通过实验比较智能车各个模块电路设计方案,从而设计出性能稳定的硬件电路,经大赛实际检验性能良好稳定。
1 系统整体方案设计
1.1 智能车功能设计
根据大赛规则,智能车应具有路径识别、方向控制、速度控制、状态检测等功能,设计采用大赛指定的飞思卡尔16位微控制器MC9S12X-Sl28单片机作为核心控制单元,利用CCD摄像头作为识别路径的传感器,经MC9S12XSl28 MCU的I/O端口处理,控制赛车的运动决策,同时内部ECT模块发出PWM波,驱动直流电机及舵机对智能车进行速度控制和转向控制,为了精确控制赛车的速度,在智能车后轴上安装光电编码器,采集车轮转速的脉冲信号,经MCU捕获后进行PID自动控制,完成智能车速度的闭环控制。设计中应注意的原则:重心尽可能低、体积尽可能小、驱动尽可能大、结构尽可能简单。
1.2 系统整体结构
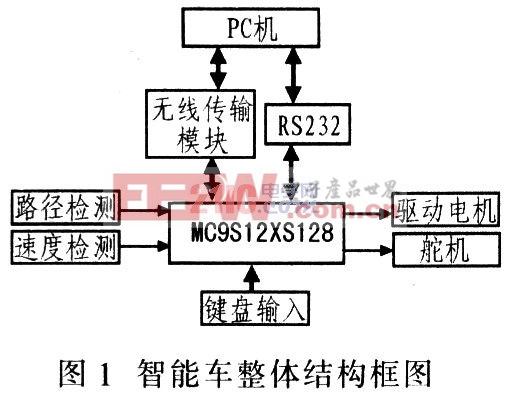
智能车的硬件设计是整个系统设计的基础,只有在系统硬件设计可行、稳定、可靠的前提下,其他控制方案才能得以继续。系统硬件主要包括单片机(主控)、CCD摄像头(图像采集)、旋转编码器(速度检测)、SD卡(大量数据存储)、无线抄表(数据的无线收发)、直流电机(速度控制)、舵机(方向控制)、电源(5 V/6 V/7 V/3.3V/9 V/12 V)、车模、驱动器MC33886、MOSFET管等组成。图1为其整体结构框图。

pid控制器相关文章:pid控制器原理


评论