基于嵌入式Linux的倒车影音系统设计
本设计是通过MiniGui加载jpeg来实现LCD实时显示USB摄像头采集到图像的。在编译程序时,加上了jpeg库的支持。编程的思路就是不断地从摄像头采集图像并存储在/tmp/l.jpg中。在Linux图形用户界面支持系统MiniGUI中,通过loadbitmap函数来加载图像,而图像加载后不会自动更新,不能根据1.jpg的改变自动变化。因此,在程序中要设定一个定时器,每隔100 ms刷新屏幕,基本上实现了实时更新。
3.2 超声波测距驱动程序的设计
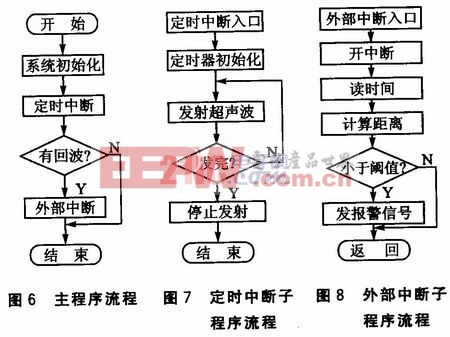
超声波发生程序的作用是由PWM定时计数器产生一个超声波信号频率约40 kHz的方波。采用Timer0,同时把Timerl打开进行计时。超声波测距器主程序利用外部中断检测返回的超声波信号,一旦发现立即进入中断程序。进入该中断后立即关闭Timerl停止计时,并将测距成功标志字赋值1。各程序流程如图6~图8所示。
当主程序检测到接收成功的标志位后,按下式计算即可得到车尾与障碍物之间的距离(设计时取20℃时的声速C为344 m/s):
S=(C·T1)/2
其中,T1为计数器Timerl的计数值。
该部分程序可设计为Linux下字符设备驱动程序。要使用Linux系统提供一个设备驱动接口函数struct file_operations的数据结构,来实现超声波传感器设备的打开、读写、释放和控制。定时器和外部中断相关寄存器的初始化和参数的设定都是在open()接口函数中完成的。在此设备驱动程序中定义的。file_operations的数据结构为:
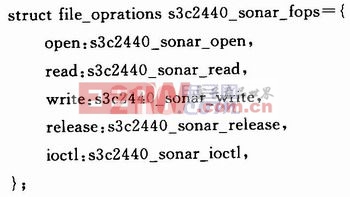
s3c2440_sonar_open()函数用于打开的设备。s3c2440_sonar_rcad()和s3c2440_sonar_write()函数用于读写设备。s3c2440_sonar_re-lease()函数完成中断的释放。s3c2440_sonar_ioctl()函数用于控制设备中定时中断和测距值,由copy_to_user()函数和put_user()函数来实现数据传递,在应用程序下打开设备,实现内核态与用户态之间的数据传递。模块初始化函数s3c2440_sonar_init()实现设备的初始化、中断初始化及处理、设备注册等。static void s3c2440_sonar_exit()用于模块卸载时中断停止、资源的释放等。
3.3 语音报警程序设计
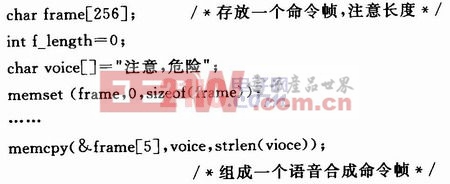
当所测距离值小于阈值时,由S3C2440发控制命令给XF-S3011,启动语音模块。组成一个语音合成命令帧的部分代码如下:
![]()
命令合成完毕后,就可以发送给XF-S3011模块了。在嵌入式Linux系统中先打开XF-S3011设备文件,然后将此命令帧写入该文件,最后关闭设备文件。
结语
本文采用嵌入式Linux操作系统和三星公司S3C2440微处理器设计的可视与语音报警为一体的安全倒车系统,具有较高的实用价值。在显示视频图像处理的过程中,能够通过超声波对车尾与障碍物之间进行测距,当测距值小于预设定的距离时会有语音对驾驶员进行报警提示。经实验验证,该系统运行稳定,能让驾驶员准确地把握车后路况,提高了倒车安全性。








评论