激光扫描车身坐标测量数据采集系统的设计
随着汽车的普及和维修业的不断发展,人们对汽车车身在维修中的检测系统提出了越来越高的要求。传统的机械式测量系统已经不能满足现代汽车测量和维修检测的要求。在国外,意大利的Spanesi公司、瑞典的Caroliner公司开发的车身电子测量系统在测量精度、操作性方面虽有一定的优势,然而它们不能进行同时多点测量,已不能适应现代汽车维修业对检测技术的要求。利用激光扫描技术可实现对车身三维尺寸的测量,满足了现代汽车维修业对检测技术的新要求。对于激光扫描测量的方法,国内还鲜有相关的报道[1-2]。
基于合作靶标的激光扫描车身坐标测量系统,是运用四光束激光扫描测量原理,综合运用激光、光电、精密测量等技术进行非接触二维或者三维坐标测量的检测系统。它具有非接触测量、不易损伤表面、结构简单、测量距离大、测量点小、抗干扰性强、速度快、实时性好、精度高、能同时进行多点测量等特点。该系统主要应用于汽车维修业,通过测量保证维修后的事故车车身状况达到原车出厂时的技术要求。本文对激光扫描车身坐标测量系统的数据采集与处理部分作了详细介绍。
1 测量系统结构
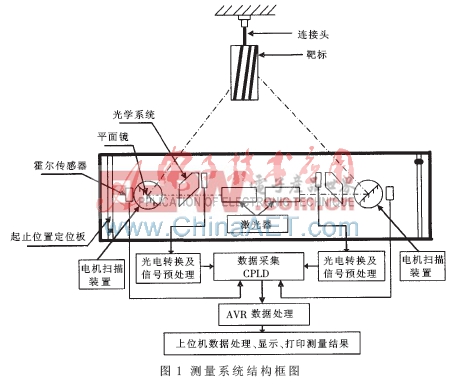
测量系统结构框图如图1所示,检测系统由特征靶标、连接头、电机扫描装置、激光器及其驱动电路、光路转折系统、霍尔传感器、光电转换及信号预处理模块、数据采集与AVR处理及上位机组成。每个电机扫描装置由电机及其驱动电路、反射镜、反射镜固定托盘和安装于反射镜固定盘侧面的小磁铁组成。工作时,电机带动平面镜旋转,当扫描激光束经由旋转的平面镜反射到特征靶标上时,由于特征靶标上面贴有原向回归反射膜,投射光束经过反射膜反射后按原光路返回,激光束经过靶标反射后经由平面镜反射至激光转折光路中;经两个平行的45°角平面镜反射后,光信号经过光电转换及预处理进入数据采集系统,和霍尔传感器产生的电机旋转同步脉冲信号一起控制数据采集电路,经过数据处理得到初步的测量点在传感器系统内的三维坐标后,送入上位机。计算机把送来的数据进行计算及坐标变换得出车身三维坐标测量结果,并进行显示或打印输出。
2 CPLD信号逻辑处理
数据采集与处理电路包括逻辑控制电路、缓存器电路、单片机接口电路等。它们的关系结构如图2所示。逻辑控制电路采集各个传感器的信号,然后将信号经4个缓存器缓存后传送给单片机;单片机结合软件实现对靶标的识别、三维坐标计算,通过串行通信与上位机连接,接收上位机的命令并将处理后的数据送入上位机打印显示[3-4]。其中传感器的信号总共有6路,包括4路由光电模块采集进来的光电信号和2路霍尔信号。逻辑控制电路选用CPLD,缓存器选用FIFO芯片,单片机选用ATmega128型AVR单片机。

霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理



评论