基于跳频通信的汽车智能防盗器设计
3.1.2 nRF905 的无线收发过程
1) 发射模式设置及过程
a) 上电以后MCU 首先配置nRF905 模式,先将PWR_UP,TX_EN,TRX_CE 设为(10X)配置模式。
b) MCU 通过SPI 将RF 寄存器的频率配置数据,配置数据移入nRF905 模块。
c) 当MCU 有数据需要发往规定节点时,接收节点的地址(TX-address)和有效数据(TX-payload)通过SPI 接口传送给nRF905。
d) MCU 设置TRX_CE,TX_EN 为高启动传输。
e) nRF905 内部处理:无线系统自动上电、数据包完成(加前导码和CRC 校验码)、数据包发送(1000kbps,GFSK,曼切斯特编码)。
2) 接收模式
a) 上电以后MCU 首先配置nRF905 模式,先将PWR_UP,TX_EN,TRX_CE 设为(10X)配置模式。
b) MCU 通过SPI 将RF 寄存器的频率配置数据,配置数据移入nRF905 模块。
c) 设置TRX_CE 高,TX_EN 低来选择RX 模式,nRF905 监测空中的信息。
d) 当nRF905 发现和接收频率相同的载波时,载波检测(CD)被置高。
e) 当nRF905 接收到有效的地址时,地址匹配(AM)被置高。
f) 当nRF905 接收到有效的数据包(CRC 校验正确)时,nRF905 去掉前导码、地址和CRC 位,数据准备就绪(DR)被置高。
g) MCU 设置TRX_CE 低,进入standby 模式(待机模式)。
h) MCU 可以以合适的速率通过SPI 接口读出有效数据。
i) 当所有的有效数据被读出后,nRF905 将AM 和DR 置低。
3.1.3 跳频的实现
nRF905 可以实现人工载波频率控制,只需要修改nRF905 的RF 工作频率寄存器的CH_NO 和HFREQ_PLL就可以选择不同的载波频率,实现跳频。位变量HFREQ_PLL 为0,表示工作在430 MHz 频段,频道差为100 kHz;为1,则表示工作在868/915 MHz 频段,频道差为200 kHz。因此共有1 024 种通信频率。通信频率(H)为H=(422.4+(CH_NO)10/10)×(1+HFREQ_PLL)。
例如CH_NO=(001001100)2=(76)10,HFREQ_PLL=0,则H=(422.4+76/10)×(1+0)=430.0 MHZ。
本系统统一设置为工作频段为430 MHz,频道差为100 kHz,每一个频点间隔为100 kHz,随机数产生于0~128之间,跳频带宽为12.8 MHz,完成一次跳频时间T≤800μs 。
3.2.1 生成随机跳频表增强安全性
为了增加安全性,每对密码锁除具有唯一对应的32 位加密地址外还增加了一一对应的随机跳频表,第一次使用时,将车机、人机对应的设置开关打开,人持终端可以产生一个随机的跳频表,并将该跳频表通过握手频率发送给车载终端,经返回校验无误时将该跳频表存储在掉电保护的非易失FLASH 存储器中,关闭设置开关,在保证两机有一一对应的跳频频率表的同时又很好地保护了频率表的安全性,只要双方按照事先约定的与跳频表对应设置一致的CH_NO 和HEFREQ_PLL 的数值便可实现跳频通信,增加了无线通信的可靠性、安全性。
3.2.2 设定握手及出错、丢包回归频率,保证通信可靠
跳频通信的一个突出问题就是尽管可靠性高,但一旦通信双方通信错误,引发跳频表读取数据不一致, 系统将发生混乱,无法通信。为解决这一问题,提高防盗器安全性和可靠性,系统设定了一个固定频率作为握手频率,人机和车机之间的通信是先从一个双方设定的握手频率来进行握手连接,该频率仅携带目标地址和握手请求或应答信号,即使被截获也不影响系统的安全性。当系统出现问题双方通信不成功时,马上回到握手频率,从跳频表初始值重新开始通信。在一次指令信息传输进行过程中屏蔽中断,保证信息的可靠传输。
3.2.3 系统工作过程
系统上电初始化跳频表后,人机和车机都通过设定系统的工作模式(Set nRF905 Mode),配置nRF905 的寄存器(Configure Register),使其工作在握手频率,接收模式(RX Mode)。当其中一端收到中断请求时(车主指令/报警信息等),便发起握手请求,握手完成后,进行两次跳频通信过程,完成信息的发送及反馈,在发送过程中,发送方发出握手请求或指令后等待响应或反馈的时间不超过200 ms,否则便认为通信出错,发起方重新发起请求。
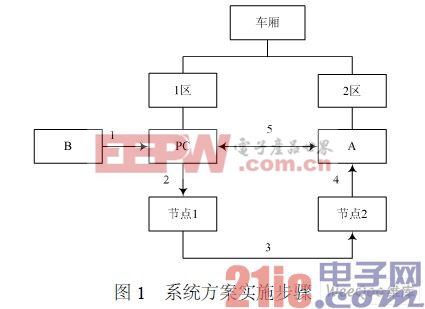
以车主发出上锁指令为例,系统整个工作过程如图3,其他车主指令发送、车载报警信息的发送过程类似。
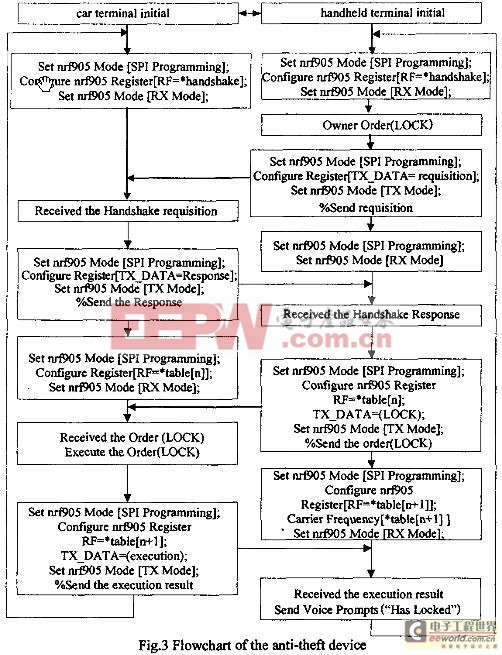
图3 防盗器工作流程图
4 结论
经测试该系统在小区内的可靠通信距离可达到150 m,满足一般汽车防盗器的实际应用要求,采用跳频通信保证了防盗器不易被截获破解,通过通信方案的优化设计,保证了跳频的通信可靠性,进一步提高了防盗器的安全性和可靠性。将该系统简化外围电路设计后也可用于摩托车防盗及其他防盗系统。


评论