基于激光二极管的智能循迹小车的硬件设计
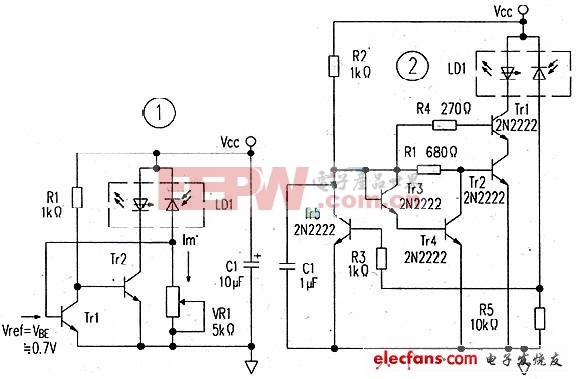
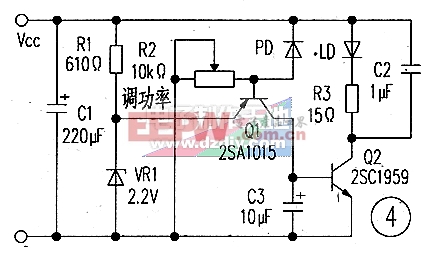
具体的红外发射及接收电路原理图如图3所示,图中左半部分为红外激光发射电路。从发射电路图可见,只需一个三极管Q1(N5551)即可直接驱动红外激光二极管HLD780060H7J,其控制信号则是一个频率为40 kHz的调制信号,由控制器产生。图中右边部分为红外接收电路,其红外接收的光敏二极管是一个PN结,需提供一个反偏电压,所以反向连接在电路中。三极管Q1、Q2构成的电路并未起到信号放大的作用,而是使得光敏传感器的工作点因环境光线的变化而变化,从而保证了传感器接收的灵敏度。在一定程度上,起到了对环境光线的自适应作用。在调试过程中,可通过调节可变电阻PR1使得传感器的信号输出最大。放大电路则可采用低噪声的运算放大器TL064来设计,此芯片内部集成了4个运放,可方便地实现信号的滤波及多级放大。将已放大的信号再通过RC积分电路便可产生A/D所要采集的电压。由于飞思卡尔智能车比赛的赛道是由白色泡沫材料及其中心的黑色引导线组成,通过将两者的A/D采样值进行比较,就可识别出黑色引导线。
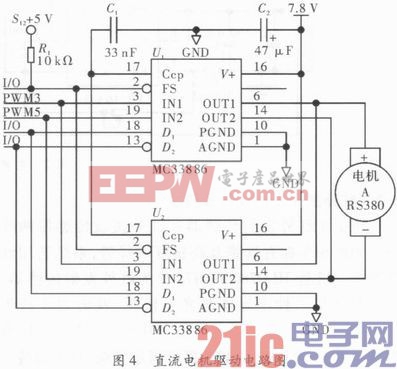
3.3 RS380直流电机驱动模块
直流电机驱动采用飞思卡尔公司的5 A集成H桥的芯片MC33886。此芯片内置有控制逻辑、电荷泵、门驱动电路以及低导通电阻的MOSFET输出电路,适用于控制感性直流负载。该芯片可提供连续的5 A电流,并集成有过流保护、过热保护和欠压保护电路。通过控制MC33886的4根输入脚(IN1、IN2、D1、D2)可实现电机正转、能耗制动及反接制动。在此应用中,MC33886的作用是将恒定的直流电压调制成频率同定而脉宽可变的PWM脉冲电压序列,从而改变输出的平均电压大小来控制电机转速。为提高对直流电机的控制精度,可将MC9S12XS128单片机内部的PWM2和PWM3两个通道8位寄存器级联成16位寄存器,并从PWM3通道输出接到MC33886的IN1。同理,可将PWM4和PWM5两个通道8位寄存器也级联成16位寄存器,从PWM5通道输出接到MC33886的IN2。通过PWM对MC33886的IN1和IN2的控制,从而实现对电机的四象限运行的控制。而直流电机RS380则直接接入MC33886的输出端OUT1和OUT2。本驱动设计采用了两片MC33886并联使用,一方面减小导通电阻对直流电机特性的影响,增强驱动电机的能力;另一方面可减小MC33886内部过流保护电路对电机启动及制动的影响,且共同分担了发热量,进一步提高了电机驱动的性能。本文引用地址:http://www.eepw.com.cn/article/196140.htm
3.4 车速测速模块
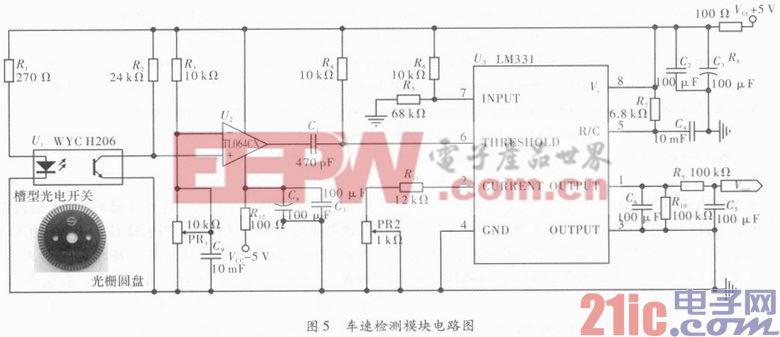
为实现遁迹小车的智能加减速,使车辆高速而平稳地跟踪引导线行驶,则必须对其进行速度检测,使车辆的速度构成一个闭环控制关系。系统的车速检测采用了低成本的槽型光电开关H206与光栅圆盘的组合来实现。其是一种透光式的检测方法,原理如图5所示,当光栅圆盘跟随被测轴旋转时,U1中左边的发光二极管的光线只能通过光栅盘上孔照射到其右边的光电管上;当光电管被照射时,其电阻较小,于是输山一个低电平信号;当光源被圆盘挡住时,则光电管电阻较大,输出端就形成一个高电平信号输出。随后再经过一个南U2构成的电压比较器,便可产生一个标准的矩形脉冲。然而,圆盘上的小孔数目是同定的,即转一周的脉冲个数是同定的。若转速变化则输出的脉冲个数也将发生变化,且该变化是线性的。然后根据v=(N/M)/T(v是转速;N为单位时间T内所产生脉冲个数;M为光栅圆盘上孔的个数;T为单位时间)便可算出被测轴的转速。但为提高测速的效率,系统采用另一种换算方法,就是将脉冲信号转换成电平信号再由单片机A/D采样获得相应的速度值。网中LM331芯片构成一个F/V转换电路。检测脉冲从LM331芯片的6脚输入,由引脚1输出一个电压信号,然后送入单片机A/D采样,不同的采样值对应不同的转速。
3.5 舵机模块及小车的组装
系统设计采用Futaba S3010型舵机,只有3根引接线,分别为地线、电源线和PWM控制线。该舵机的实质是一个位置随动系统,其由舵盘、减速齿轮组、位置反馈电位计、直流电机和控制电路组成,通过内部位置反馈,可使舵盘输出转角正比于其给定的控制信号。即在负载力矩小于其最大输出力矩的情况下,其输出转角将会正比于给定的脉冲宽度。为提高舵机的响应速度,将其工作电压直接连接电池电压7.2 V,并将单片机内部的PWM0和PWM1两路8位输出级联成一个16位的PWM,再由PWM1通道输出给舵机。在实践中,还可通过采取加长舵机力臂增大摆幅的方法进一步提高舵机的响应速度。

图6为本设计智能循迹小车的组装实物图。由于传感器对赛道信息捕获的效果将直接影响智能车的控制策略及其速度。为获得尽量大的前瞻,如图6所示,设计将15个均等间隔排列的激光传感器固定在一个离地面约25 cm的位置,并以58°角射向前方路面,使得小车的前瞻可达40 cm。同时将舵机通过垫板垫高,加长了前轮控制力臂的长度,从而提高了前轮转向的响应速度。并在电机及其驱动MC33886表面均加装了散热器,来提高电机运行的性能。通过科学的硬件设计,与合理的算法,便可让系统对赛道信息进行提前获取并做出即时、正确的决策,从而使车辆做到弯道提前减速,直道提前加速跑出更加节省路程的路径。
4 结束语
文中对基于红外激光二极管的智能循迹小车的硬件系统进行了分析与设计。介绍了智能车的控制器模块、电源管理模块、路径识别模块、电机驱动模块、车速测速模块以及舵机模块等6部分的硬件电路设计,并给出了部分模块的实际电路图。最终展示了智能循迹小车的实物图。实践证明,该车可快速平稳地实现循迹功能。

电路图符号相关文章:电路图符号大全
电流变送器相关文章:电流变送器原理 光电开关相关文章:光电开关原理 脉冲点火器相关文章:脉冲点火器原理 激光二极管相关文章:激光二极管原理


评论