使用TI的Vision AccelerationPac,实现汽车可视探
使用Vision AccelerationPac的圆形交通标志识别举例
典型的视觉分析处理涉及几个阶段(如图3所示),包括图像预处理与特性检测、相关物体识别、图像与模式匹配,最后才是决策判断。TI的Vision AccelerationPac最适合于减轻视觉分析处理前三个阶段的密集计算。决策判断通常包括分类器、浮点运算和矩阵转换,C66x DSP内核对它们的处理最为有效。正因如此,Vision AccelerationPac在SoC中与一个或者多个DSP配对使用。结果是,把视觉分析工作量合理是划分开来。
TI的TDA2x可实现低功耗、高性能的视觉处理系统。它拥有两颗C66x DSP内核和一个Vision AccelerationPac,以及两个嵌入式视觉引擎(EVE)。另外,它还包括一个视频前端和汽车汽车联网接口。下一页的图4显示了TDA2xx SoC结构图。
下面,我们来探讨Vision AccelerationPac如何能够加速ADAS圆形交通标志识别。
一些世界圆形交通标志使用红色圆圈作为分界线,因此第一步便是从YUV422输入数据只提取红色像素。第二步是,计算水平和垂直梯度,使用亮度和对比度来确证红色边界线。然后,使用霍夫变换算法找出圆形。现在,使用数据库中存储的模式使圆形内被识别相关区域图像关联起来,以解释交通标志(80 MPH),最终做出决策判断。在这种情况下,结论是限速80英里/小时。
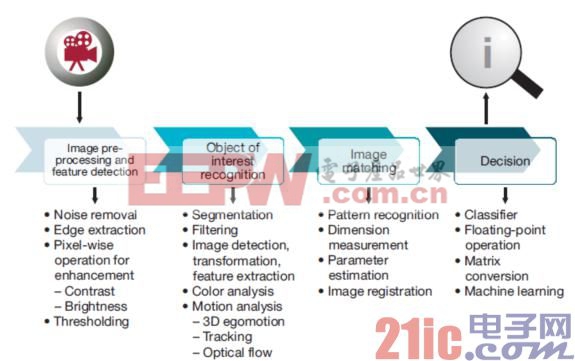
图3视觉分析处理流程图
如下面图5所示,Vision AccelerationPac可以高效地分担圆形交通标志识别处理的大多数工作量,包括基于互关联的块匹配模板加速器。DSP内核用于提高最终决策的稳健性。使用霍夫变换算法来查找圆形是一项高计算密集型工作,但使用Vision AccelerationPac时,霍夫变换算法查找圆形仅需140字节个代码空间,约(1.88*NUM_RADIUS) +1.81 cyc/pix个处理时间周期,其中,NUM_RADIUS为我们在霍夫空间内选择搜索的半径数,因此它的视觉识别时间非常短,功耗非常低,并且硅片面积的性价比很高。以每秒30帧对一幅720 × 480图像进行完全交通标志识别约需50 MHz,即小于10% EVE周期。保持了丰富的处理功能,表明一个EVE可以同时运行多个视觉算法。
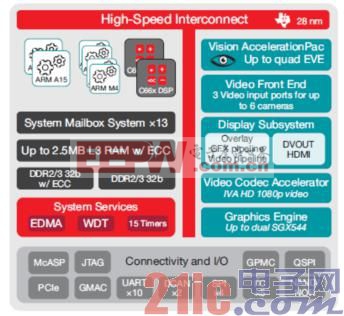
图4 TDA2x结构图
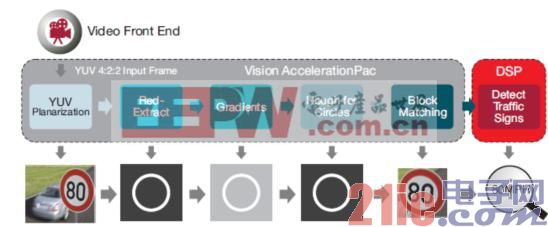
图5 使用Vision AccelerationPac实现圆形交通标志识别
机器视觉Vision AccelerationPac—汽车或者摄像头处理以外的应用
Vision AccelerationPac可以使用的其它领域还有很多。除视频摄像头分析处理以外,Vision AccelerationPac的固点倍增器和硬件通道是雷达分析处理的理想选择,因为它可以高效地处理快速傅里叶变换(FFT)和波束形成算法。利用Vision AccelerationPac来处理1024点FFT所花费的时间小于3.5µ秒。因此,雷达可用作汽车摄像头系统的补充,以探测许多不同的交通和气象状况。
汽车视觉所使用的相同机制,也适用于许多其它机器视觉行业;工业自动化、视频安全监控和警告系统、交通监控和车牌识别便是例子。Vision AccelerationPac可用于扩展DSP应用,以一种更加自主和高功效的方式来解决今天的许多视觉分析问题。
结论
Vision AccelerationPac是德州仪器创新型视觉分析解决方案。利用一种针对高效嵌入式视觉处理进行高度优化的灵活SIMD架构,Vision AccelerationPac拥有非常低的功耗和优异的硅片面积效率。Vision AccelerationPac与C66x DSP内核结合使用,可实现浮点和矩阵计算,从而极大地加速完整嵌入式视觉应用处理链。除是一种高效、可靠的架构以外,Vision AccelerationPac还使用一种简单的基于C/C++的编程模型,输出非常紧凑的代码。它意味着,Vision AccelerationPac实现的系统具有非常低的内存占用,从而进一步降低了视觉系统成本和功耗。TDA2x SoC及其Vision AccelerationPac,是实现智能汽车系统、工业机器和“可视”机器人视觉分析的一个理想平台,它们共同提高了我们的生活品质。
TDAx SoC更多详情,请访问www.ti.com/TDA2x。
参考文献
(1) 谷歌在Va. Tech测试无人驾驶汽车
(2) 尼桑宣布史无前例的无人驾驶汽车发展计划
作者:德州仪器 (TI) 战略营销经理Zhihong Lin、嵌入式视觉引擎首席架构师Jagadeesh Sankaran博士和技术战略主任Tom Flanagan
鸣谢
感谢Stephanie Pearson、Debbie Greenstreet、Gaurav Agarwal、Frank Forster、Brooke Williams、 Dennis Rauschmayer、Jason Jones、Andre Schnarrenberger、Peter Labaziewicz、Dipan Mandal、 Roman Staszewski和Curt Moore给本文提供的支持。







评论