采用刀片法对飞秒激光束腰半径的实时测量与计算
LabVIEW是一个具有革命性的图形化编程开发平台,它内置信号采集、测量分析与数据显示功能,摒弃了传统开发工具的复杂性,提供强大功能的同时还保证了系统灵活性。PCI数据采集卡带有可以供LabVIEW调用的子程序,而电动平移台可以通过计算机串口输送指令,使用数据采集卡的1通道作为信号输入端,考虑到功率计的响应和激光器的重复频率.每隔10微秒采集一次信号,这样不会漏掉信号。电动平移台每走一次,光功率计记录一个数值,同时将数值与所走的步数作为数据输出并进行存储。
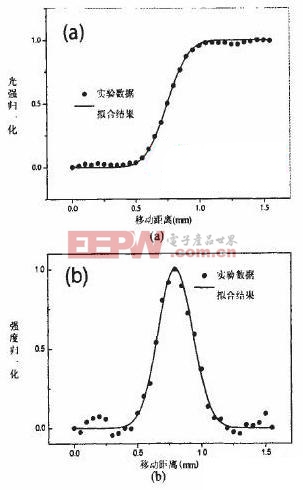
图2 (a)刀片切割激光光束的透射功率随x轴位置变化的曲线(点
为实验数据曲线,实线为数据拟合曲线) (b)对图2(a)中数据进
行求导并拟合的曲线(点为实验数据曲线.实线为数据拟合曲线)
图3是对数据进行自动处理的程序,图3(a)图是前面板,可以看到将光功率求导得到的高斯型分布的数据进行求导得到的拟合结果中给出了.关于激光光束束腰半径的信息。图中初始值是进行Guassian拟合前输入的估计数值,下面是拟合得到的结果。图中的横轴为电动平移台移动的步数,纵轴分别为归一化的光功率和及其一阶导数。图3(b)图中显示的是数据处理的结构框图,显示的是数据的流程图。将刀片所处位置及其光功率数据作为两列数值输出,首先对光功率数值进行归一化,然后调用LabVIEW软件当中的求微分模块进行微分,为了更为精确地求出激光的束腰半径,对微分结果进行线性插值。使用Gaussian型拟合模块对结果进行拟合,拟合得到的结果进行积分并与实验测量到的数据进行比较并分析误差,残差保持在0.01以内。

图3 (a)使用LabvlEW编程的数据自动处理的前面板 (b)结构框图
使用刀片法实时测量后透镜焦点附近的激光光束的束腰半径,得出束腰半径与透镜位置的关系,发现j与接近焦点时,束腰半径逐渐变小,这符合距离焦点越近,束腰半径越小的原则。但当经过焦点时由于激光光束的束腰半径最小,对应飞秒激光具有最强的峰值功率,通过计算其强度约为2.5×1017W/m2,在刀刃表面发生烧蚀作用,对刃口有了一定的破坏作用。通过这一方法可以简单测出材料发生烧蚀的阈值功率,可见使用刀片切割强激光光束测量束腰半径时,需要适当减小飞秒激光的入射功率。
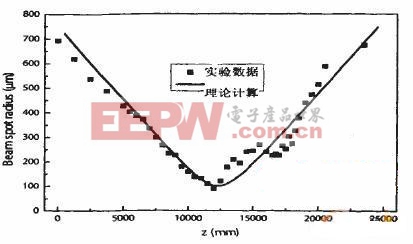
图4 计算束腰半径相对于激光传播距离z的关
系盈(点线为实验结果,实线为理论计算结果)
5 结论
针对经过透镜聚焦后的飞秒脉冲激光,使用LabVIEW编程技术对激光束腰半径进行了在线实时地测量和计算,并阐述了测量过程和误差分析。使用刀片法测量束腰半径有几个优点:(1)实现激光束腰半径的自动化在线测量与计算;(2)使用光电倍增管或硅光二极管等较为便宜的设备作为光电探测器,将光信号转换为电信号;(3)测量其他形状的脉冲如hat-top,seth2型的激光脉冲,需要改变结构框图中相应的拟合类型即可。飞秒激光聚焦后峰值功率极高,进行刀片法实验时需要适当降低激光的入射能量,避免在刀刃表面产生烧蚀作用,影响实验的精度。



评论