基于DSP+CPLD 可重构数控系统的设计与仿真
1、前言
本文引用地址:http://www.eepw.com.cn/article/191989.htm随着计算机技术的高速发展,各工业发达国家投入巨资,对现代制造技术进行研究开发,提出了全新的制造模式,其核心思想之一是柔性化制造,制造系统能够随着加工条件的变化动态调整。目前,各类MCU 快速发展,它们不仅运算速度快、价格便宜、种类繁多,而目不同M CU 针对不同的应用在其片上集成了专用控制电路,满足了不同的应用需求还提高了电路的安全性和稳定性。综合上述的分析与论证,本文设计了一种基于DSP+CPLD 现场可编程门阵列器件的可重构数控系统。
2、硬件设计
本运动控制卡是以PC 机作为主机的运动控制卡,选用DSP 作为核心微处理器,卡上集成编码器信号采集和处理电路,D/A输出电路,扩展存储器电路和PC-DSP通讯电路。PC机把粗处理的数据通过DSP-PC 通讯接口传递给运动控制系统,DSP通过对光电编码器反馈信号处理电路的结果分析,计算出与给定位置的误差值,再通过软件位置调节器获得位置控制量,计算出运动速度控制量,产生的输出信号经D/A 转换将模拟电压量送给伺服放大器,通过对伺服电机的控制实现对位置的闭环控制。系统的结构框图如图 1 所示。
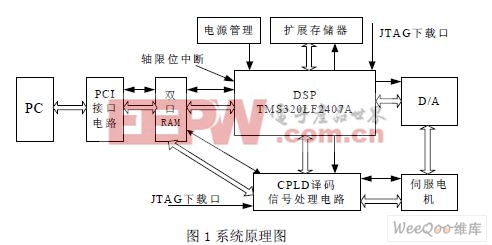
选用美国TI公司的16位定点DSPTMS320LF2407A作为本运动控制器的核心处理器,地址译码、时序逻辑、编码器信号处理电路用CPLD来完成,用PCI 接口芯片实现双口RAM与PC 机的通讯,双口RAM用来存储和缓冲DSP与PC 机间的通讯数据,SRAM用来存储运动控制器运行时的程序和数据。
(1).DSP外部中断接口处理
对于数控机床来说,由于受工作行程等各方面的限制,在其超过控制范围时,引入包括限位中断和编码器INDEX 信号中断。每个控制轴有正反方向的两个限位开关,产生两个限位信号,4 个轴共8 个限位信号:LIMA+, LIMA -、LIMB +, LIMB -、LIMC +, LIMC-,LIMD+, LIMD -其中“+”表示正限位,“-”表示负限位。这几个信号通过CPLD 的相与之后接到DSP 的中断管脚XINT1,同时这些信号通过光藕电路接入DSP的I/O 口。当运动到限位开关处时,就会触发DSP的外部中断信号XINT1,然后DSP就可以根据I/O 判定是哪个限位开关超过工作范围。8 个限位开关分别接到DSP 的I/O 口,通过设置MCRA(地址:7090H),MCRB(地址:7092H)为零,使这些复用管脚处于I/O 功能。限位输入信号的状态可以从寄存器PADATDIR(地址:7098H )和PBDATDIR(地址:709AH)对应的数据位读取,对应的数据方向位设为零,以使这些I/O 管脚工作在“输入”状态下。编码器的INDEX信号处理同上面相类似。每个轴能产生一个INDEX 信号,4 个轴有4个INDEX 信号。这4 个信号通过逻辑与门产生一个中断信号,接到XINT2,同时接到DSP 的I/O 口,供中断产生时DSP读入。

伺服电机相关文章:伺服电机工作原理













评论