FPGA的模糊控制交通灯控制方案设计
摘要:针对目前交叉路口交通控制信号灯的绿信比固定不变的问题,提出一种模糊控制的方案。根据当前相位的车流量和当前相位与下一相位车流量之差,实时控制相位绿信比,缩减车辆在交叉路口的排队长度。绿信比可在FPGA上模拟实现,采用E-Elements ISE Development Kit开发套件,使用ISE10.1软件设计工具,对上述控制方案进行仿真。
关键词:交叉路口;模糊控制;FPGA;ISE10.1
1 概述
为了解决城市交通拥挤的问题,需要从供求两个方面来采取措施:一是加强城市道路的基础建设,二是要充分利用、提高现有路网的利用效率。目前,国内的城市交通灯大多数都是采用固定的绿信比(一个信号相位的有效绿灯时长与周期时长之比),不能满足交叉路口车辆的时变性要求。
模糊控制技术作为智能控制的重要分支之一,它的最大特点是针对各类具有非线性、强耦合、不确定性、时变的多变量复杂系统,在各个控制领域中得到广泛的应用,并取得良好的控制效果。在城市道路中存在大量的平面交叉路口,交叉路口一般可以分成十字形、X形、T行、Y行和多路交叉形,本文以十字形交叉路口作为研究对象。
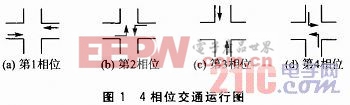
在平面交叉路口上某一支或者几支交通流所获得的通行权称为信号权,简称相位。一个周期内有几个信号相位,则称该信号系统为几相位系统。本文以双向6车道4相位系统为例。第1相位东两方向交通流直行,第2相位东西方向交通流左转,第3相位南北方向交通流直行,第4相位南北方向交通流左转,所有右转方向交通流不予控制。其交通运行图如图1所示。
2 模糊控制器的设计
模糊控制器通常包括模糊化接口、数据库、规则库、模糊推理机和解模糊接口5部分,如图2所示。

2.1 隶属度函数
为了完成输入的模糊化,必须知道输入精确值对模糊化的隶属度函数,如取7个,即PL(正大)、PM(正中)、PS(正小)、ZE(零)、NS(负小)、NM(负中)、NL(负大)。在精度要求比较高的情况下可以采用正态分布,一般情况下可取三角形或者梯形,本文采用三角形的隶属度函数。
在红灯期间,取线圈感应取为100 m,车身及车距平均距离取5 m,将测得的车辆排队长度P看作模糊变量。其论域为:
P={1,3,5,7,9,11,13,15,17,19,21}
取7个语言值,其赋值表如表1所列。

当前相位车队长度与下一相位的车队长度之差Q作为绿灯延迟的修正值。其论域为:
Q={-12,-9,-6,3,0,3,6,9,12)










评论