基于FPGA的惯导组合数据采集及控制系统设计
摘要:利用FPGA并行处理的特点及其丰富的I/O接口,在此设计了一种针对捷联惯导系统的组合数据采集和控制系统。该系统能够实时采集惯导系统所需的IMU和GPS数据,能够根据需要产生任意占空比的PWM控制信号,该系统预留了丰富的I/O接口,方便和DSP等处理器进行无缝连接。测试结果表明,通过这种方法设计的系统,体积小,可靠性高、实时性强。
关键词:捷联惯导系统;FPGA;IMU;GPS;PWM
0 引言
捷联惯导系统是将惯性敏感器件陀螺仪和加速度计直接安装在运载体上,是不需要稳定平台的惯性导航系统。捷联惯导系统通过计算机内的姿态矩阵实时解析计算而得到一个数学平台,该平台起到在惯性空间始终保持所要求姿态的作用。由于捷联惯导的数学平台代替了稳定平台,这要求导航计算机必须具有很高的运算速度和精度。由于纯惯导系统的速度、位置信息误差随时间积累,随着导航技术的发展,惯性测量单元(IMU)提供的数据难以完成精度较高的长期导航任务。这就需要在长期导航任务中引入GPS进行辅助导航,但是GPS数据自主性差,发射的信号容易受到外部干扰,接收机数据更新频率低,单独使用难以满足导航实时要求。通过将IMU与GPS组合构成的导航系统可以克服两者单独工作的缺点,互相取长补短,更好地完成导航任务。IMU,GPS数据的两者融合正是通过IMU-GPS数据采集系统实现的。
根据惯性导航系统的特点,设计了一种基于FPGA实现IMU-GPS数据采集及PWM控制的系统,可以实现IMU数据和GPS数据的同时采集,可以根据需要产生任意占空比的PWM控制信号。
1 系统总体结构
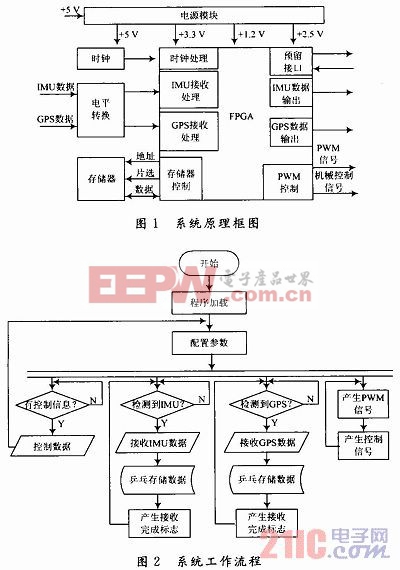
惯导和GPS组合导航系统要求既要具有高速实时的计算能力,也要具有丰富的外设接口,保证采样速度和精度。同时,根据整个系统小型化的考虑,惯导平台通常采用小容量PWM驱动装置,从而减小对加速度计、陀螺仪等惯性器件外部电磁环境的影响,保证其工作精度。FPGA具有丰富的I/O功能,还可以多个进程并行运行,能满足组合导航的要求。本文设计的捷联惯导数据采集与处理系统就采用FPGA作为核心处理芯片实现IMU-GPS数据采集处理和PWM控制,系统硬件结构如图1所示,系统的核心处理器FPGA选用Xilinx公司的XC3S400,它采用90 nm工艺,最大容量40万门,工作频率可达200 MHz。此外,系统还包括电源管理单元,程序和数据存储器,接口电平转换单元等部分组成。系统采用5 V供电,选用TI公司的TPS75003作为电源管理芯片,提供3.3V,2.5V和1.2V电压。
2 FPGA设计实现
该系统充分利用FPGA可并行运行的特点,利用软件编程在单片FPGA上并行实现IMU数据、GPS信息的接收处理、存储器和PWM控制,同时根据FPGA具有丰富的I/O接口特点,通过编程为DSP等微处理器的无缝接入预留接口。系统的工作流程如图2所示。









评论