基于PLC的智能温度控制器的研究
在实际控制过程中, 无论是给定量还是过程量都是工程实际值, 它们的取值范围都是不相同的.因此在进行PID运算前, 必须将工程实际值标准化.PLC 在对模拟量进行PID运算后, 对输出产生的控制作用是在[0.0,1]范围的标准值, 不能驱动实际的驱动装置, 必须将其转换成工程实际值.
由于电加热炉具有较大的延时性, 所以采输出值, 0.0~1.012 Kc数正数双字, 实数I 回路增益, 正、负常数16 Ts I 采样时间, 单位为s, 正20 Ti I 积分时间常数, 单位为min,24 Td I 微分时间常数, 单位为min, 正数式控制.大致采用三段控制: 第一段, 开始阶段置电源为满开度, 以最大的功率输出克服热惯性; 第二段, 等到温度达到一定值转为PID控制; 第三段, 接近设定点时置电源开度为0, 提供一个保温阶段, 以适应温度的滞后温升.程序流程图如图3 所示, 图中X,Y根据实际设定.
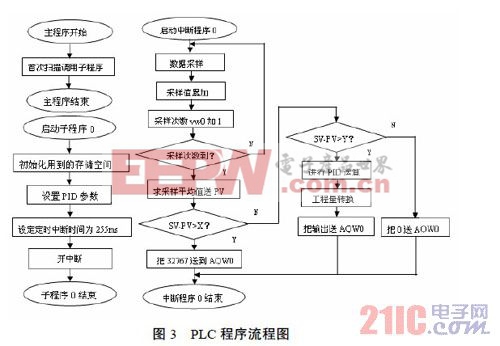
PID参数的调节是很重要的, 调节方法有很多, 概括起来有两大类:一是理论计算整定法.它主要是依据系统的数学模型, 经过理论计算确定控制器参数.二是工程整定方法, 它主要依赖工程经验, 直接在控制系统的试验中进行, 且方法简单、易于掌握.在工程实际中, 控制系统难以建立起精确的数学模型, 所以一般采用工程整定法.PID参数的工程整定法主要有临界比例法、反应曲线法和衰减法.在这里选用临界比例度法, 整定步骤如下: (1)首先预选择一个足够短的采样周期让系统工作; (2)仅加入比例控制环节, 直到系统对输入的阶跃响应出现临界振荡, 记下这时的比例放大系数和临界振荡周期; (3)在一定的控制度下通过公式计算得到PID控制器的参数.
4 PLC 与计算机通讯的设计
由于VB具有强大的图形处理功能,界面可视化性强, 而且操作简单, 容易实现, 故采用VB来实现上位机和下位机的通信 .其下位急是S7-200系列PLC, 上位机是通过RS-232 串行口与PLC 相连的计算机.
4.1 PLC程序部分
S7-200 支持多种通讯模式, 其中在自由口通讯方式下, 用户可以利用梯形图程序中的接收完成中断、发送完成中断、发送指令和接收指令完成S7-200 系列PLC 与上位机的通讯.
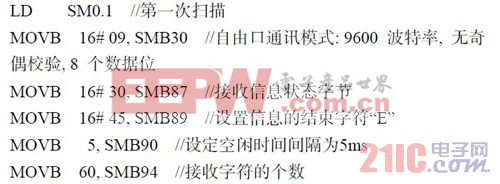
PLC 的CPU 处于STOP 模式时,自由口通讯被禁止, 只有当CPU 处于RUN 模式时, 才可使用自由口通讯.SMB30(这里选择端口0)是自由口模式控制字节, 用来设定校验方式、通讯协议、波特率等通讯参数.发送指令XMT 启动自由端口模式下数据缓冲区中的数据发送, 它可以方便地发送1~255 个字符,如果有中断程序连接到发送结束事件上, 在发送完成后, 端口0 会产生中断事件9, 也可以监视发送完成状态位SM45 的变化.接收指令RCV 可以初始化接收信息服务, 通过指定的通讯端口接收信息并存储在数据缓冲区内.在接收完最后一个字符时, 端口0 产生中断事件23. PLC 初始化程序如下:

pid控制器相关文章:pid控制器原理










评论