基于CPLD的温度自动控制系统的研制
2.2 dahlin算法参数的整定
(1)由系统的飞升曲线(如图7)确定对象的纯滞后时间参数θ和被控对象的时间参数τ1。
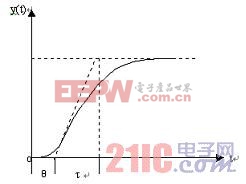
图7 被控对象的飞升曲线
(2)综合控制精度、超调量等指标选取合适的采样周期T。若T偏大,则取样稀疏,单位时间内控制点过少,势必造成较大的过冲量以及系统控制误差;若T偏小,则对采样量化字长要求过高,对于有限字长的控制系统过密的采样周期会使系统控制失败。
(3)由N=θ/T确定N值。
(4)对象放大系数K的确定。K可由下列公式确定:

(5)τ一般与T取同量级,不断调整τ值,观察系统的响应图,使得闭环系统的指标达到最佳。
3 系统应用
从该温度自动控制系统的软硬件构成可以看出,这种设计具有比较好的开放性,便于在软硬件方面进行功能扩展和重新配置,同时应用系统的构造也比较灵活。由于采用了高容量低成本的CPLD器件 MAX7128,将本系统的控制部分的核心电路的硬件资源进行了整合集成,提高了系统硬件的可靠性。针对不同的控制对象,只要适当的改变一下前端的信号处理电路,并采用满足要求的控制算法,即可胜任面对各种对象的控制任务。因此系统具备结构开放、性能可靠、灵活方便等特点,可以灵活地胜任不同对象的温度自动控制任务。















评论