基于FPGA的交通路口车流量检测方法研究
由图2可以看出,路面上有很多不连贯的黑色区域和黑点,这些噪声会对检测结果产生不利的影响,因此,将上述二值化后的图像序列再进行中值滤波,采用5*5的检测窗口,可以去滤掉图像上大部分的椒盐噪声,起到保护边缘信息的作用,如图3所示。本文引用地址:http://www.eepw.com.cn/article/189598.htm

1.2 算法实现
由图2及图3清晰可见,经过二值化后的图像,车身前方的阴影呈黑色,路面呈白色,因此能把车身前方的阴影部分和路面信息清晰的分隔开来。当车辆行驶到某一位置时,车身前方的阴影一定会造成车辆前方的路面上的区域的灰度值发生剧烈的变化。因此,当发生一次剧烈变化,计数器计一次数,这样即可计算出行驶过的车辆的数量。
在车辆行驶的道路前方,设置一虚拟检测区域,便可以实现上述过程。传统的虚拟检测区域可以分为3类:基于特征点、基于检测线、基于检测窗口。于检测点包含的信息量太少,且易受噪声干扰;而检测区域过大,当车辆经过时,容易造成重复计数,因此文中将采取基于检测线的检测方法。如图4所示。
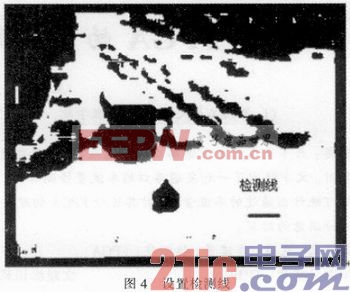
当车辆即将行驶到检测线上时,车身前方的阴影会迅速覆盖检测线,造成检测线上的灰度值发生剧烈的变化。通过设定阈值,若灰度变化大于阈值,可判断为有一辆车到达,若灰度变化小于阈值,就判断为没有车辆通过,这样便完成了整个检测过程。
由上可知,我们只需处理每一帧图像的一行像素值,因此大大减少了数据的存储空间,从而使计算机的处理速度更快。在实际处理中,用前一帧图像减去后一帧图像,比较差值图像检测线位置的像素值,此处通过大量实验数据,设定阈值为15,若其值大于该阈值,则可判断有车辆通过,若小于该阈值,则没有车辆通过。所有检测线位置像素值做差后,可得到如图5所示的数据曲线。
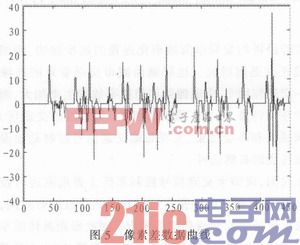
由图5可见,图像的正值尖峰,可看做一辆车的到来,通过设定阈值,可将小的尖峰部分滤掉,小的尖峰部分是车身及车窗造成的干扰,故通过此方法,可得到具体通过路口的车辆的数量。
统计宽阔路口的车流量,可将整个路口分成几个车道,对几个车道分别用此方法进行统计,最终求和,即可实现车流量的统计。











评论