电磁式操纵负荷系统的设计与实现
2.3 系统软件实现
电磁式操纵负荷系统的软件用Visual C++6.0编写,主要由初始化模块、模型负载力计算模块和故障处理模块组成。
系统软件的主要任务是依据纵向负载力的数学模型,实时计算纵向模型负载力。首先实时地从主控计算机和位移传感器、速度传感器中接收当前迎角或侧滑角、马赫数、升降舵襟翼角及升降舵偏角、升降舵调整片偏角、纵向角加速度、纵向过载、驾驶杆位移、驾驶杆移动速度及其他与负载力有关的参数,在预先给定的二维插值函数表内插值和计算得到当前时刻的铰链力矩导数,计算出当前时刻的铰链力矩及气动力,然后计算当前的其他负载力,最后计算总的模型负载力。
3 试验验证
试验的目的是找出操纵负荷系统中的力、位移、电压之间的关系,得出三者之间的关系曲线,验证电磁式操纵负荷系统的性能。
实验设备主要有:电磁式操纵负荷系统、示波器、卷尺(精确到0.1 mm)、钢尺(精确到0.5 mm)、胶带、剪刀和标记笔等。
因为推杆和拉杆是可逆的过程,所以实验只考虑其中之一,以拉杆为例,假设其产生的操纵负荷的力为正。
由于操纵机构的上下杆长度之比为8:1,所以杆位移量为磁铁位移量的8倍。在电压为3 V,6 V,10 V这三种情况下,改变位移的大小,记录力随位移的变化曲线,如图5所示。本文引用地址:http://www.eepw.com.cn/article/187442.htm
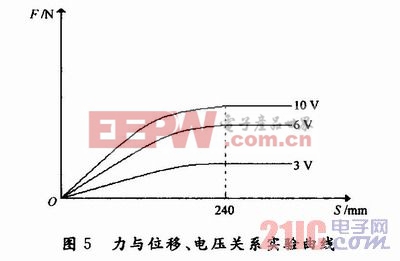
由图5可以看出,电磁操纵负荷系统的力、位移、电压关系实验曲与图1所示的某型教练机杆力杆位移曲线基本吻合,同时还得出结论:铁芯长度+磁铁长度=最大行程/2;力是位移与电流的函数;线圈最大宽度小于最大行程。
4 结语
利用电磁作动筒作为飞行模拟器操纵负荷仿真系统的力伺服系统,构成了飞机纵向操纵负荷仿真系统,现在已经成功应用于某型教练机飞行模拟器的纵向操纵负荷仿真系统中。通过近几年的模拟训练证明,该方法仿真精度高,响应速度快,负载力模型和参数易于修改,可适
应不同仿真对象和不同工作模式负载力特性变化的要求,可推广应用于多种类型的飞行模拟器的操纵系统中。该方法还可用于横向操纵负载力及脚蹬力的仿真。











评论