电磁式操纵负荷系统的设计与实现
2 仿真系统设计
2.1 仿真系统结构
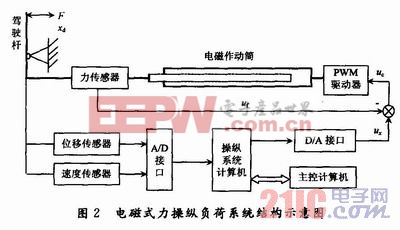
仿真系统结构如图2所示。当拉杆或推杆时,驾驶杆的位置发生变化,产生的位移、速度信号经传感器实时地送给操纵系统计算机,操纵系统计算机同时还实时地从主控计算机接收与纵向负载力有关的参数,按有关数学模型计算出当前反应在握杆点、操纵者施加在驾驶杆上的纵向模型负载力信号,经D/A变换后为ux。同时,驾驶杆的位置变化通过力传感器传递给作动筒,使作动筒伸长量发生变化,力传感器还将纵向负载力转变成电信号uf,它与ux之差构成PWM驱动器的控制信号uc,控制信号uc经PWM驱动器放大后驱动电磁作动筒工作,使作动筒的伸长量发生新的变化。经过力传感器的负反馈作用,可使uf与ux的差值趋于零,保证了通过电磁作动筒、力传感器给驾驶杆加载的力等于按负载力数学模型计算的力。本文引用地址:http://www.eepw.com.cn/article/187442.htm
2.2 电磁作动筒的设计
飞行模拟器电磁式操纵负荷系统的核心部件是电磁作动筒,其性能决定了电磁式操纵负荷系统的性能,对飞行模拟器的整机性能也产生重大影响。
2.2.1 电磁作动筒的组成
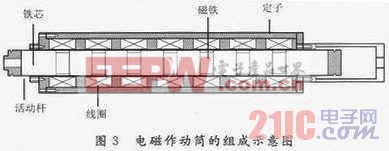
飞行模拟器电磁式操纵负荷系统的电磁作动筒主要由活动杆、定子两部分组成,如图3所示。其中活动杆由七块永久磁铁和八块铁芯组成,活动杆的外部材料采用金属铝。定子的内部结构主要由七个线圈组成,线圈一般为铜线,相邻线圈的绕向相反,线圈之间是尼龙,而外筒则是由不锈钢制成。这里选择线圈的宽度为52mm,磁铁宽度为35mm,尼龙的宽度为10mm。











评论