开关电源无模型控制的研究
4.1 无模型控制的总体概述
在控制律设计中一般的需要建立动态系统的数学模型。经典的方法要求这种数学模型必 须事先建立至少其结构必须事先确定。而且模型愈精确愈好。无模型控制律的设计中,突破了控制律对数学模型尽可能事先精确的建立这一要求的限制。
我们的建模手续是伴随反馈控制而进行的。初始的数学模型可以是不精确的,但必须保证所设计的控制律具有一定的收敛性.我们所设计的无模型控制律是边建模边控制,得到新的观测数据后,再建模再控制.如此继续下去,使得每次得到的数学模型逐渐精确,从而控制律的性能也随之得到改善。我们把这种手续称之为实时建模与反馈控制一体化手续。
4.2 建模与自适应控制一体化途径
在参考文献中,提出了如下的泛模型:
y(k)-y(k-1)=φ(k-1)[u(k-1)-u(k-2)> (4-1)
不失一般性,这里假定被控动态系统S的时滞是1,y(k) 是系统S的一维输出, u(k-1)是P维输人。φ(k)是特征参量,它是利用某种辨识算法在线估计的,k是离散时间。我们将会看出,在实时辨识D实时反馈校正的辨识与控制一体化手续中,φ(k)有明显的数学与工程意义。
4.3 实时建模与反馈控制一体化
具体的,我们的建模与反馈控制一体化的框架如下:
(1)依据观测数据和泛模型
y(k)-y(k-1)=φ(k-1)[u(k-1)-u(k-2)]
利用适当的估值方法,得到了φ(k-1)的估值φ(k-1)。
(2)寻求φ(k-1)的向前一步的预报值φ*(k),一个简单的方法就是取
φ*(k)= φ*(k-1)
在寻求控制律时,我们把φ*(k)仍记成社φ(k) 。 (3)把控制律
作用于系统S,得到新的输出贝y(k+1)。于是得到了一组新的数据{y(k+1),u(k)} 。
在这组新数据的基础上重复(1),(2)和(3),即可又得出新的数据{y(k+2),u(k+1)}如此继续下去。只要系统S满足一定的条件,在这种手续的作用下,系统s的输出y(k)将逐渐地逼近y0。
4.4 控制器程序的设计
目前在工业生产过程控制中应用的控制器,绝大多数是经典的PID调节器及其变种,对于耦合情况不严重的系统,PID调节器的控制效果还能令人满意,但对耦合严重的系统,PID调节器则显得无能为力,下面以PID调节器为基准,将无模型控制器与PID调节器进行比较,用于说明无模型控制器具备较好的解耦和抗干扰能力。无模型控制流程图如下:
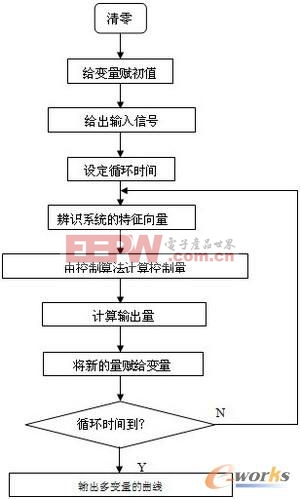
图3 无模型控制流程图









评论